Space Exploration
The Robotics Institute at Carnegie Mellon University has a strong legacy in building robots for space exploration. As NASA’s most significant partner in space robotics research since the 1980s, several robotic systems have been designed, built and tested in extreme conditions such as the arctic, the driest desert, inside a volcano and deep underwater.
Technologies created at the Robotics Institute have already found their way into the solar system and the work continues with the upcoming lunar landing of MoonRanger.
MoonRanger
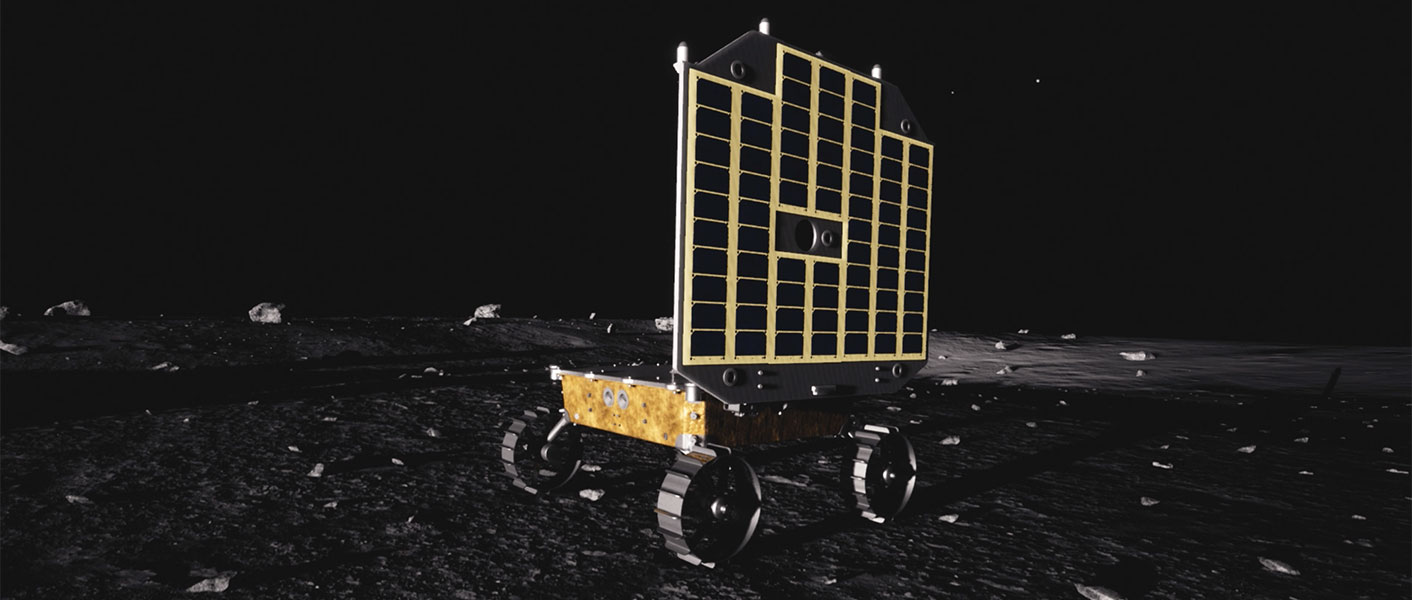
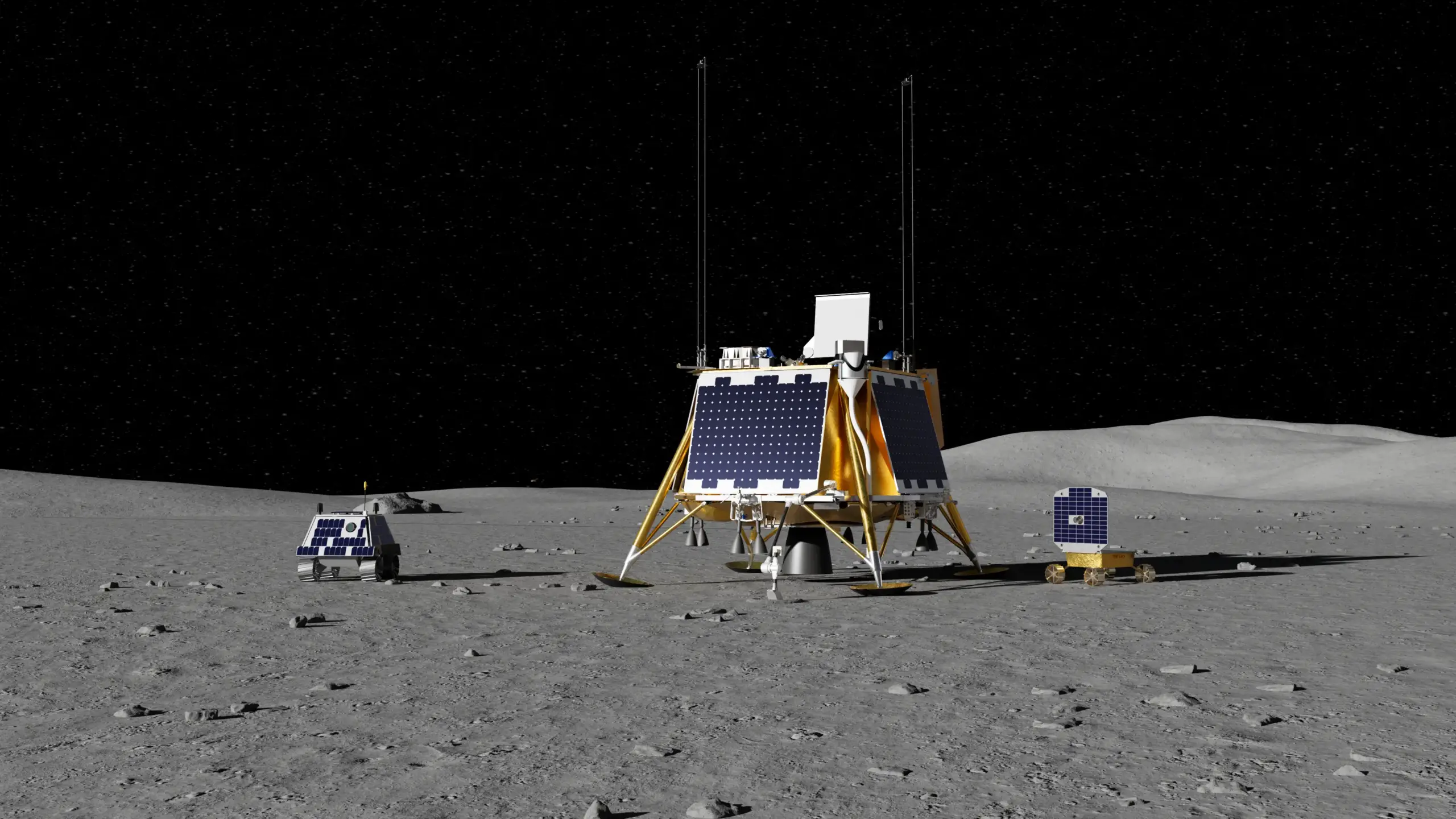
MoonRanger, a suitcase-sized rover developed by CMU and its spinoff Astrobotic in collaboration with NASA’s Ames Research Center, passed NASA’s key decision point review and is in the final stages of preparation for a future mission to search for signs of water at the moon’s south pole in 2029.
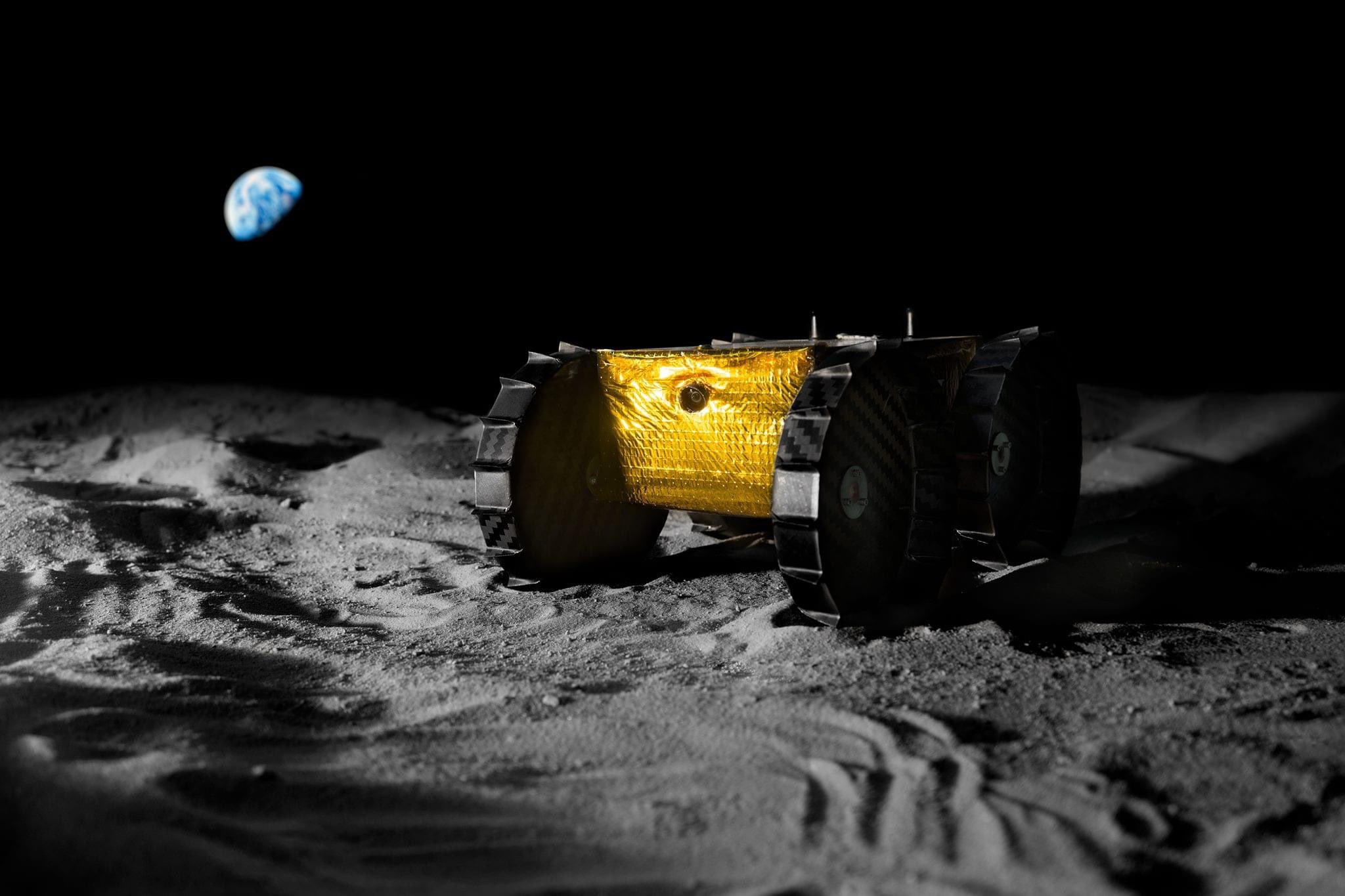

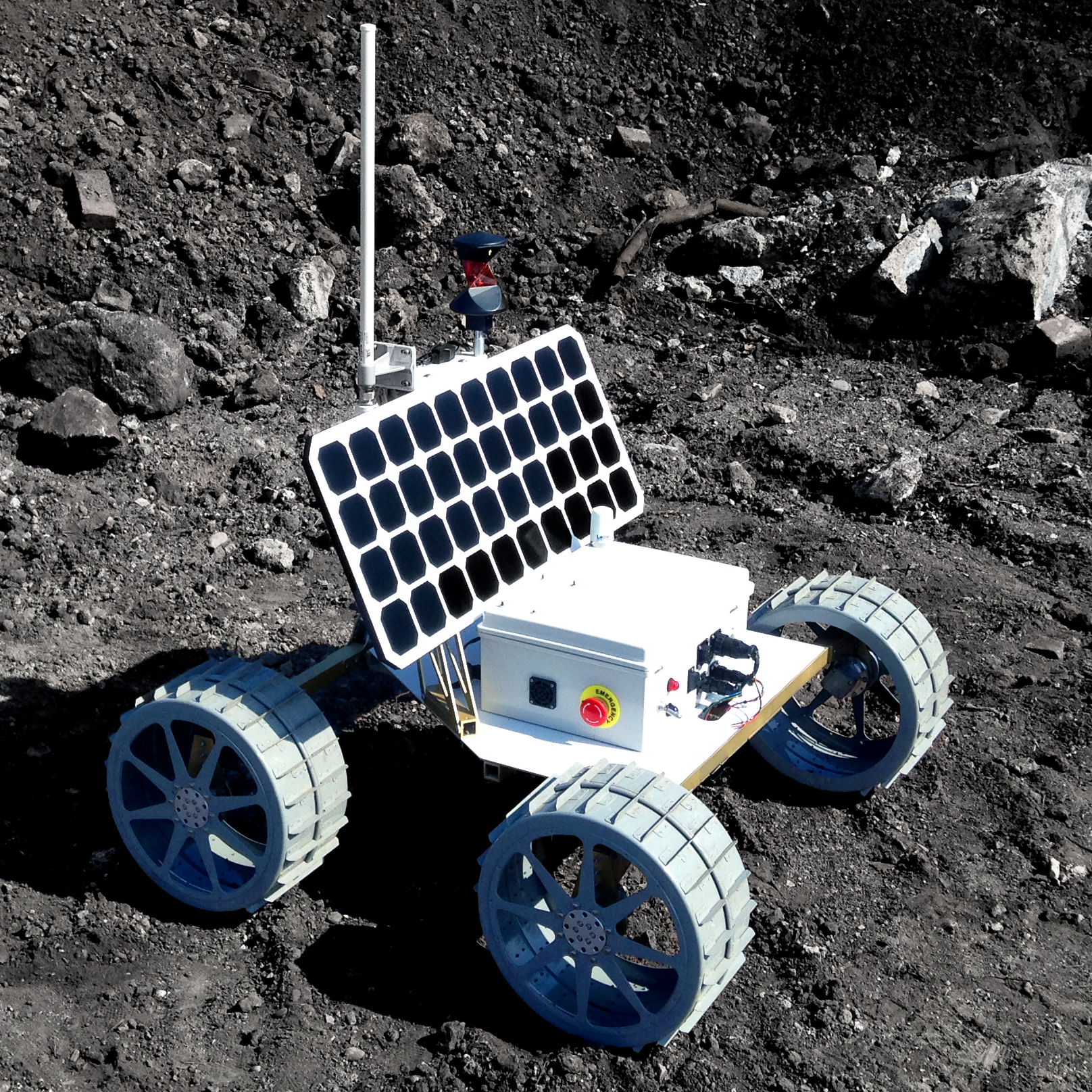
Andy 2 was one rover prototype built for the Google Lunar X-Prize challenge. Mobility tests were conducted at NASA Glenn Research Center on material equivalent to lunar sand.



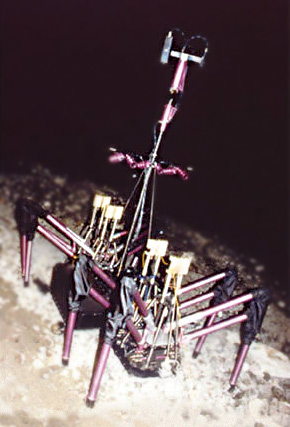
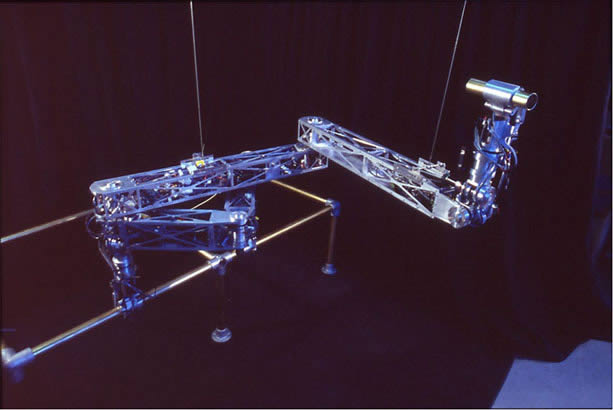
The TRESTLE project developed the architectural framework necessary to coordinate robots performing complex assembly projects. It sought to develop architectural tools used to coordinate actions performed by multiple robots, in this case, the NASA RoboCrane, Xavier and Bullwinkle.




The goals of this program were to develop robots for autonomous search of Antarctic meteorites and demonstrate robotic capability with planetary analogs of environment, control, navigation, communications, and scientific research.