Course Overview
The complete and accurate schedule for current and upcoming robotics courses is maintained at the University level and can be accessed by visiting the university courses page.
All courses with a “16-” prefix are offered by the Robotics department. Other departments offering courses taught by Robotics faculty are Computer Science (CS), Electrical and Computer Engineering (ECE), Mechanical Engineering (MechE), Statistics (Stat), Psychology (Psych), the Tepper School of Business (GSIA), and the Institute for Complex Engineered Systems (ICES).
Finding Robotics 16-xxx Courses on the Registrar Site:
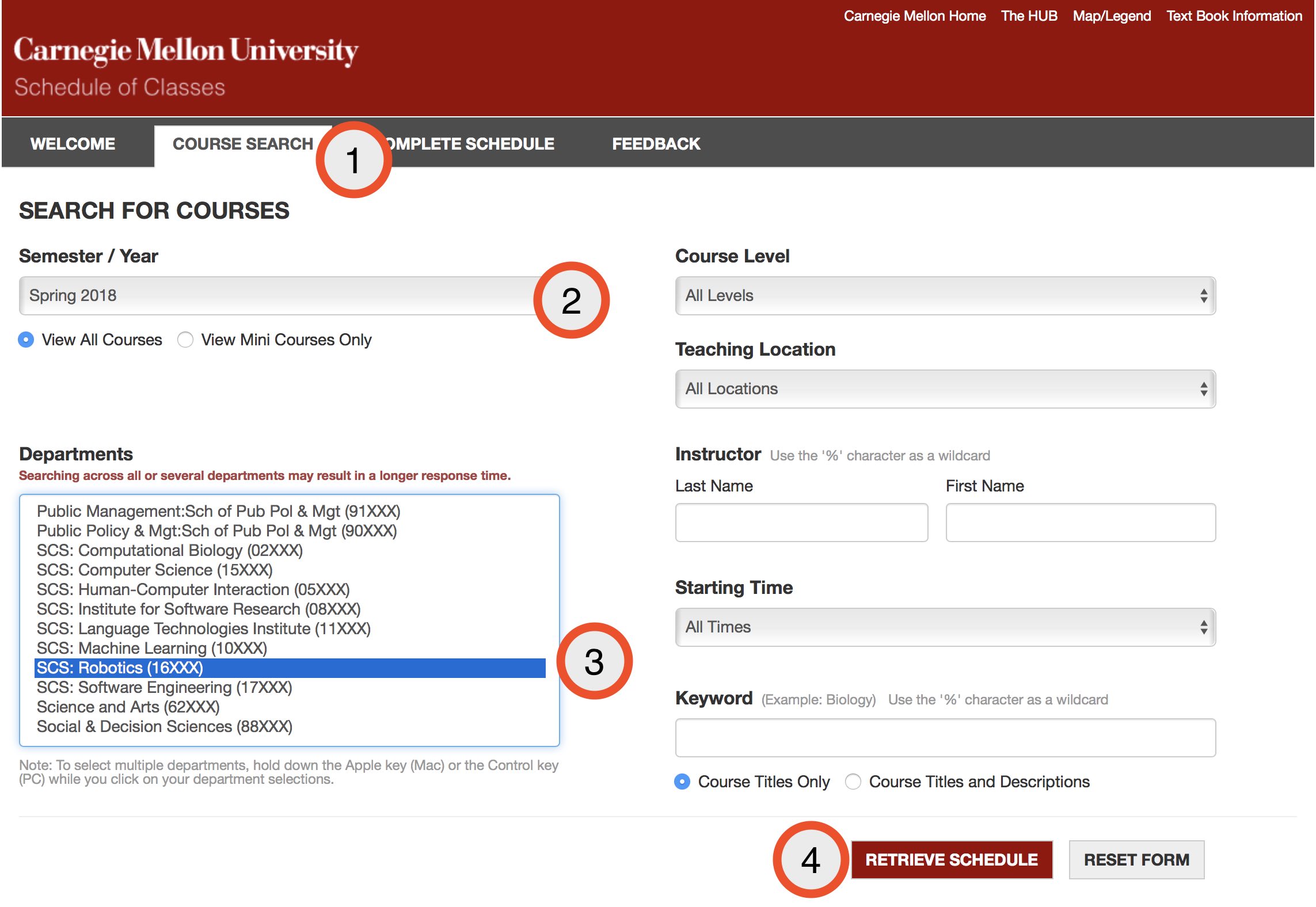
- Go to: Schedule of Classes Course Search.
- Select the “Semester/Year”
- Select “SCS: Robotics (16-xxx)” from the list of departments.
- Click “RETRIEVE SCHEDULE”