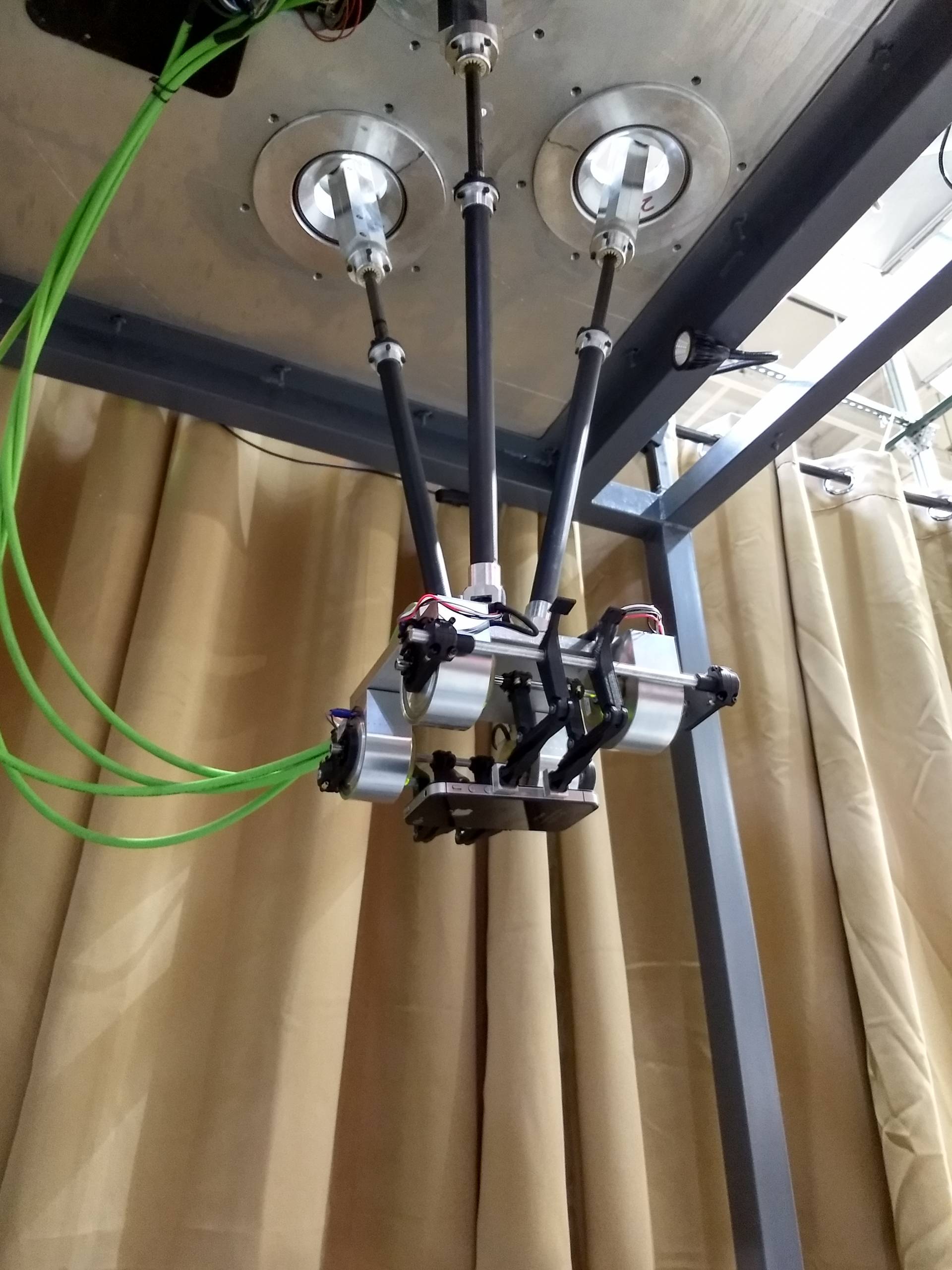
For high-volume industrial applications, manipulators need to have a dynamic range of motion as well as to safely interact with the environment. Most of the conventional manipulators have geared actuators and have high reflective inertia which limits the dynamic motion of the manipulator. Unlike geared actuators, direct drive manipulators have high back-drivability, and combining with it hybrid force/position control helps in achieving safe but highly dynamic motions. Thus, in this work, we have built a Directive Drive Delta arm(D3) arm(parallel manipulator) and combined it with a direct drive gripper.
This work includes the development of force control strategies and kinematics for a parallel direct-drive manipulator. In this work, we develop an admittance control strategy that allows the manipulator to act like a mass-spring-damper system and safely interact with the environment. And because of the direct-drive nature of the actuators, we directly calculate the external end-effector forces from the current readings of the manipulator (proprioceptive sensing) . We also develop kinematics of the manipulator to map the current reading to the external forces. An analytical approach was used for calculating the inverse kinematics and a numerical method was used for calculating forward kinematics. Given the kinematics as well as the force controller, we are trying to come up with a highly dynamic pick-place strategy. Based on the current state-of-the-art methods, we are using deep learning-based techniques to achieve pick-and-place with high accuracy. Also to expand this work to varying sizes of devices, we are randomizing our training using concepts from “dynamics randomization”. Also for this arm, we have developed a simulation environment in Mujoco+Robosuite where we safely test/train different strategies.