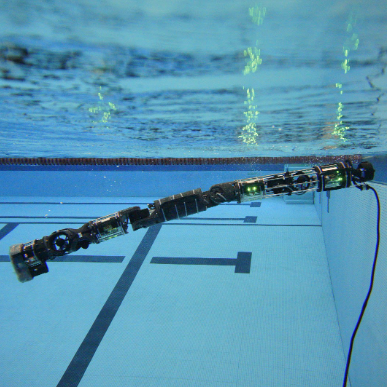
Currently, no technology exists that can place robot end-effectors into any confined, awkwardly shaped, and hazardous space. The purpose of this project is to expand the range of operating environments in which robots can perform inspection and maintenance. In particular, our research, and the snake-like robots we have designed to support it, focuses on navigating through submerged structures and containers such as ballast tanks, fuel tanks, and pipelines. To achieve this, we first built a waterproof modular snake-like robot (Hardened Underwater Modular Robotic Snake) that is both agile and robust. We also designed a user-friendly tele-op control system to perform human-in-loop inspections. The challenge primarily lies with the turbulence and turbid environment, making it difficult for human operators to identify the robot’s current state. Current work seeks to mitigate this via increased autonomy. Development of a robust real-time path planning capability via search and online, contact aware, Model Predictive Control is anticipated to reduce operator burden and expand the environments HUMRS can access.