In multi-agent robotic systems, it is not often that we consider the different and rich ways in which agents interact in their environment, especially when that environment possesses complicated dynamics of its own. In nature, however, there exist an abundance of systems which contain agents that move about in environments that respond dynamically to the locomotion of neighboring agents. Fish schools, bacterial swarms, and migratory cell groups are but a few, impacting their environment, say by shedding vortices in a fluid or by pushing against surrounding compliant substrates, to affect locomotion and thus motion in neighboring agents. The basis of our work concerning the dynamics and control of multi-robot systems in ambient media is embracing and leveraging the geometric nature of multi-robot interactions in such environments. To do this, we draw on nonholonomic mechanical models and inviscid fluid flow models that have served the locomotion community for decades — the multi-link wheeled snake robot, the Chaplygin beanie, and flexible foil-shaped swimmers — in order to develop more methodical solutions to problems involving coordination and control. See Fig. 1 below for visualizations of these three examples.
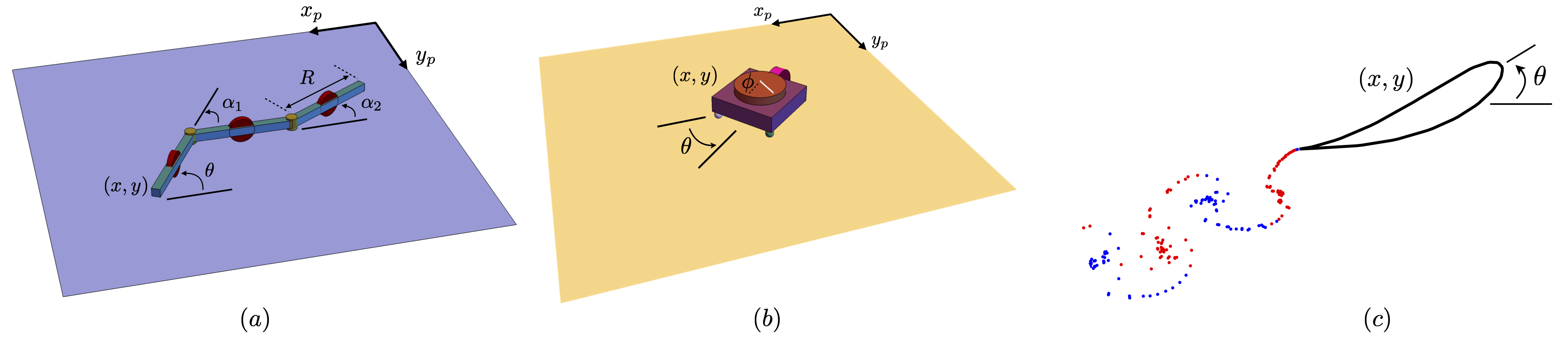
Fig. 1. (a) A three-link nonholonomic snake robot coupled to a platform with finite inertia via a no-slip condition on its wheels (shown in red), (b) A Chaplygin beanie; an underactuated robot with a single internal degree of freedom coupled to a platform via a no-slip condition at its rear wheel (shown in pink), (c) A freely-deforming Joukowski foil shedding point vortices from its trailing edge discretely in time. Each colored dot denotes a point vortex, colorized so as to represent the sign of the strength at which it was shed. Red vortices denote a positive circulation, while blue denote a negative circulation.
Passively compliant systems: The role of compliance in robotics is ubiquitous. The same is true of multi-robot systems that interact with a dynamic environment. In our investigations of multi-robot dynamics and control, we consider problems involving multi-robot locomotion where locomotion arises purely from passive compliance within the body of uncontrolled robots and seek to understand how this can aid in ongoing efforts to control such systems. Such investigations often involve constructing proof that a given locomotive behavior can be achieved and, furthermore, that it can be achieved in a stable manner. Our recent publication, for example, formally showed that a passively compliant Chaplygin beanie (Fig. 1. (b)) would locomote stably forward on a moving platform for all time under arbitrary initial conditions in its rotor position, elucidating the class of locomotive behaviors one can begin to study for controlled versions of the same system. Additionally, some passively compliant multi-robot systems exhibit quite rich behaviors, e.g., coordination, resulting from an exchange in momentum between robots and the environment. This phenomenon is recognized as passive dynamic entrainment and is currently among the problems we are investigating in a multi-robot version of the Chaplygin beanie on a platform (Fig. 1. (b)).
Externally actuated locomoting systems: We define an externally actuated locomoting system to be any system comprising an environment containing passively compliant or actively driven agents wherein direct control over the environment is assumed, without regard to where this control input originates. This is in contrast to an internally actuated locomoting system, comprising a combination of actively driven and passively compliant agents in a passively compliant medium, i.e., we do not directly assume control over the environment, but may assume control over it through degrees of freedom internal to the agent. The former of these systems is an idealization in many respects, as it is a first step toward deriving control strategies for the latter. In other words, it is useful to the control theorist or roboticist to know first how an environment should be excited to achieve a desired physical response from the agents within it. Control of an internally actuated locomoting system can then be equated to controlling an agent to excite the environment in a particular way, perhaps inducing locomotion in a neighboring agent or even communicating with a neighboring agent in a more abstract sense.
Mechanical communication: Perhaps the most motivating application of our work is understanding how to communicate between agents when the ambient medium is the mechanism for information transfer. This type of communication is termed mechanical communication and has been shown to exist in aggregates of cardiac cells as they exert forces on their elastic environments, communicating mechanically through the environment to influence cell migration (see this). We draw inspiration from such systems in our investigations of mechanical communication in robotics.


