Cluster: Coordinated Robotics for Material Handling
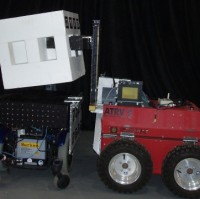
Planetary robots which perform assembly tasks to prepare for human exploration must be able to operate in unmodeled environments and in unanticipated situations. We are working on a system of mobile robots that perform precise coordinated maneuvers for transporting assembly materials. We are also developing an interface that allows an operator to step in at various levels of autonomy, providing the system with both the efficiency of an autonomous system and the reliability of a human operator.
This work is performed at the Field Robotics Center in the Robotics Institute at Carnegie Mellon University in partnership with TRACLabs, Inc. and is sponsored by a NASA Phase II STTR contract.