Transforming Surface Representations to Volumetric Representations
This Project is no longer active.
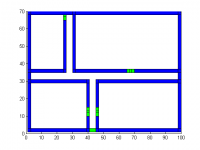
Laser scanners sense only the surfaces of the environment, while BIM representations are typically volumetric in nature. In this research, we are investigating methods for transforming the surface based “boundary representation” (also known as b-rep) into a volumetric representation, which is a form of constrained solid geometry (CSG). This problem is challenging because it is necessary to address the irregularities of sensed data as well as the limited visibility of partially occluded surfaces.
This project is funded in part, by the National Science Foundation (CMMI-0856558) and by the Pennsylvania Infrastructure Technology Alliance.
