
Car detection and registration has many applications in the real world such as automated surveillance, image search and retrieval, intelligent vehicles, and robot navigation. We have been developing a method for multi-view car detection from still images. In particular, we deal with cars at eight different viewpoints (shown in Fig 1. Five of them are invariant due to the symmetry). We have collected over 7,000 car images of city scenes. For each image, we label a set of landmark points which are used to align each sample into a reference shape. Fig. 2 and Fig. 3 show the averaged car images and their shape deformations.
We use multiclass logitboost to select discriminative features for each view. For each individual view, we also train a binary classifier to differentiate cars from the cluttered background. The labeled landmark points can be used to register and verify each detection result. We evaluate our algorithms on a number of test images containing varying viewpoints and degrees of occlusions.
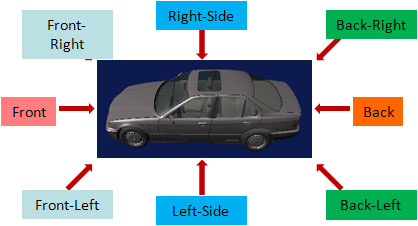 |
Fig 1. Multiple viewpoints. Invariant views are shown in the same color. |
 |
Fig 2. Averaged images after alignment. |
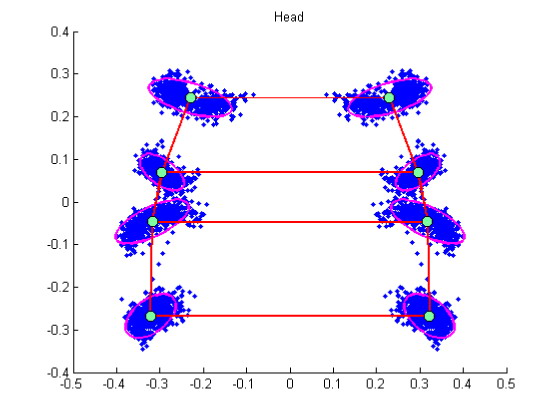 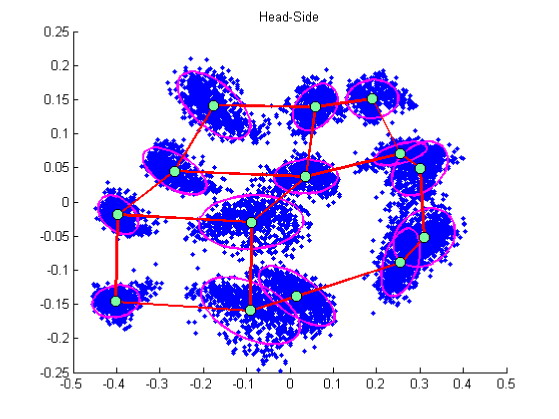 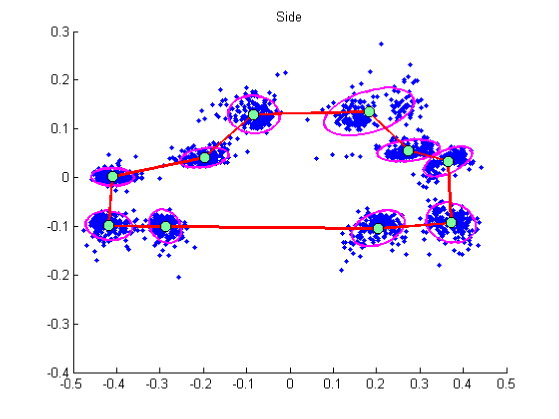 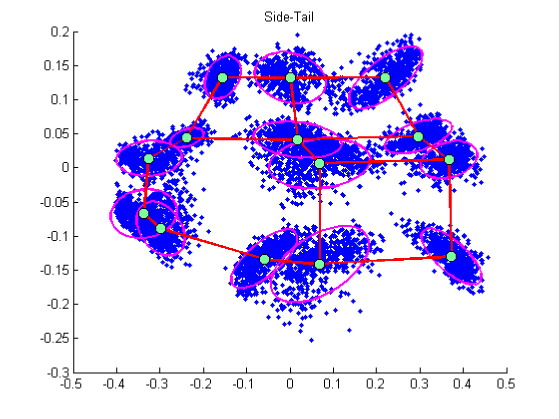 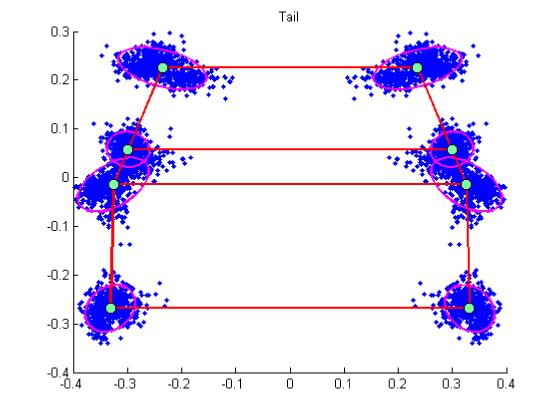 |
Fig 3. Shape variations. |
 |
Multiclass feature selection (AVI, 2.4M) |