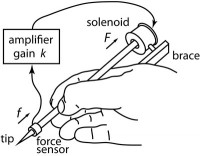
We have developed a novel and relatively simple method for magnifying
forces perceived by an operator using a tool. A sensor measures the force between
the tip of a tool and its handle held by the operator’s fingers. These
measurements are used to create a proportionally greater force between the
handle and a brace attached to the operator’s hand, providing an enhanced
perception of forces between the tip of the tool and a target. We have designed
and tested several prototype that are completely hand-held and thus can be easily
manipulated to a wide variety of locations and orientations. Preliminary psychophysical
evaluation demonstrates that the device improves the ability to
detect and differentiate between small forces at the tip of the tool. Magnifying
forces in this manner may provide an improved ability to perform delicate surgical
procedures, while preserving the flexibility of a hand-held instrument.