Cyber-Physical Systems (CPS) encompass a large variety of systems including example future energy systems (e.g. smart grid), homeland security and emergency response, smart medical technologies, smart cars and air transportation. One of the most important challenges in the design and deployment of Cyber-Physical Systems is how to formally guarantee that they are amenable to effective human control. This is a challenging problem not only because of the operational changes and increasing complexity of future CPS but also because of the nonlinear nature of the human-CPS system under realistic assumptions. Current state of the art has in general produced simplified models and has not fully considered realistic assumptions about system and environmental constraints or human cognitive abilities and limitations. The engineering controls discipline has for years been developing human control models of engineered systems with very impoverished human models (e.g. human is modeled as a disturbance to the system). Our analytic models that incorporate realistic human cognitive constraints and abilities will provide new techniques, models and insights to this community.
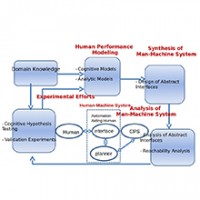
To overcome current state of the art limitations, our overall research goal is to develop a theoretical framework for complex human-CPS that enables formal analysis and verification under realistic assumptions about the operation environment, model uncertainties and human cognitive limitations and abilities. In particular, the project is developing a cognitively plausible analytic model of a human operator that will be integrated into a hybrid system model of CPS in order to verify the integrated human-CPS system. Our overall technical approach is to (a) develop and appropriately leverage general cognitive models that incorporate human limitations and capabilities, (b) develop methods to abstract cognitive models to yield tractable analytical human models (c) develop innovative techniques to design the abstract interface between the human and underlying system to reflect mutual constraints, and (d) extend current state-of-the-art reachability and verification algorithms for analysis of abstract interfaces, in which one of the systems in the feedback loop (i.e., the user) is mostly unknown, uncertain, highly variable or poorly modeled.
The project is making its impact in the scientific community with broad significance in the following areas: (1) fundamental principles and algorithms that would serve as a foundation for provably safe robust hybrid control systems for mixed human-CPS and (2) methods for the development of analytical human models that incorporate cognitive abilities and limitations and their consequences in human control of CPS.