Team Explorer Performs Impressively at Subterranean Challenge’s Tunnel Circuit
 PITTSBURGH—Team Explorer from Carnegie Mellon University and Oregon State University deployed robots to autonomously map and search underground mines and outscored 10 competing teams at the initial scored event in the DARPA Subterranean Challenge.
PITTSBURGH—Team Explorer from Carnegie Mellon University and Oregon State University deployed robots to autonomously map and search underground mines and outscored 10 competing teams at the initial scored event in the DARPA Subterranean Challenge.
On four occasions during the eight-day event, each team deployed multiple robots into National Institute for Occupational Safety and Health research mines in South Park Township, Pennsylvania. The robots navigated on their own for an hour at a time as they searched for objects, such as simulated human survivors, in a mine disaster scenario. Team Explorer detected and pinpointed 25 of these artifacts in its two best runs, 14 more than any other team.
In addition to being named champions of the event, the team also was cited for “Most Accurate Artifact,” for identifying and locating a backpack inside a mine within less than 20 centimeters from its actual position.
“All the teams worked very hard to get here and each took a slightly different approach to the problem,” said Matt Travers, a system scientist at CMU’s Robotics Institute and co-leader of Team Explorer. “This was a great experience for all of us and we are proud of the performance by our team members and our robots.”
The event, which concluded today in Pittsburgh, was sponsored by the Defense Advanced Research Projects Agency. Called the Tunnel Circuit, it was the first of four events planned for the Subterranean Challenge, which will conclude two years from now with one team claiming a $2 million grand prize.
The challenge will develop technologies needed by military and civilian first responders when faced with damaged underground environments suspected to be unsafe for humans.
To accomplish their mission in the Tunnel Circuit, the robots needed to cope with mine conditions such as mud and water, and to communicate with each other and with a base station outside the mine despite the radio limitations inherent in underground operations.
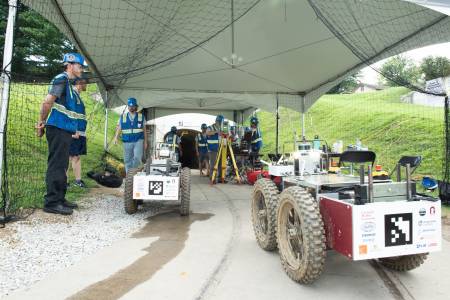
“Mobility was a big advantage for us,” said Sebastian Scherer, an associate research professor in the Robotics Institute and co-leader of the team. Unlike most teams, which relied on off-the-shelf robots, Explorer designed and built its two ground vehicles and two drones specifically to operate in the mines. “We had big wheels and lots of power,” he added, “and autonomy that just wouldn’t quit.”
Geoff Hollinger, an assistant professor of mechanical engineering at Oregon State and a CMU robotics alumnus, and his students provided additional expertise in multirobot systems.
As typical of CMU robotics, the team tested their robots and their procedures rigorously, in this case at the Tour-Ed Mine in Tarentum, Pennysylvania, prior to the event.
“The testing was brutal at the end,” Scherer said, with early morning meetings to resolve problems from the previous day, followed by long days at the mine. “But it paid off. We were prepared for this.”
 The team includes about 30 faculty, students and staff members from Carnegie Mellon and from Oregon State. The team benefited from previous CMU work on mining applications and from experience in other DARPA challenges, including its victory in the 2007 DARPA Urban Challenge robot race that popularized self-driving cars.
The team includes about 30 faculty, students and staff members from Carnegie Mellon and from Oregon State. The team benefited from previous CMU work on mining applications and from experience in other DARPA challenges, including its victory in the 2007 DARPA Urban Challenge robot race that popularized self-driving cars.
Future events in the Subterranean Challenge will include an Urban Circuit, where robots will explore complex underground facilities, and a Cave Circuit, where the robots will operate in natural caves.
Explorer is one of seven teams that will receive up to $4.5 million from DARPA to develop their hardware and software for the competition. The team is also sponsored by the Richard King Mellon Foundation, Schlumberger, Microsoft, Boeing, FLIR Systems, Near Earth Autonomy, Epson, Lord, and Doodle Labs.
Contact: Byron Spice, 412-268-9068, bspice@cs.cmu.edu
Virginia Alvino Young, 412-268-8356, vay@cmu.edu