Robots That Readily Expand or Shrink Would Be Possible
Carnegie Mellon University researchers have found a way to design telescoping structures that can bend and twist, enabling robots of various shapes to collapse themselves for transport or entering tiny spaces, and making possible robotic arms and claws that can reach over or around large obstacles.
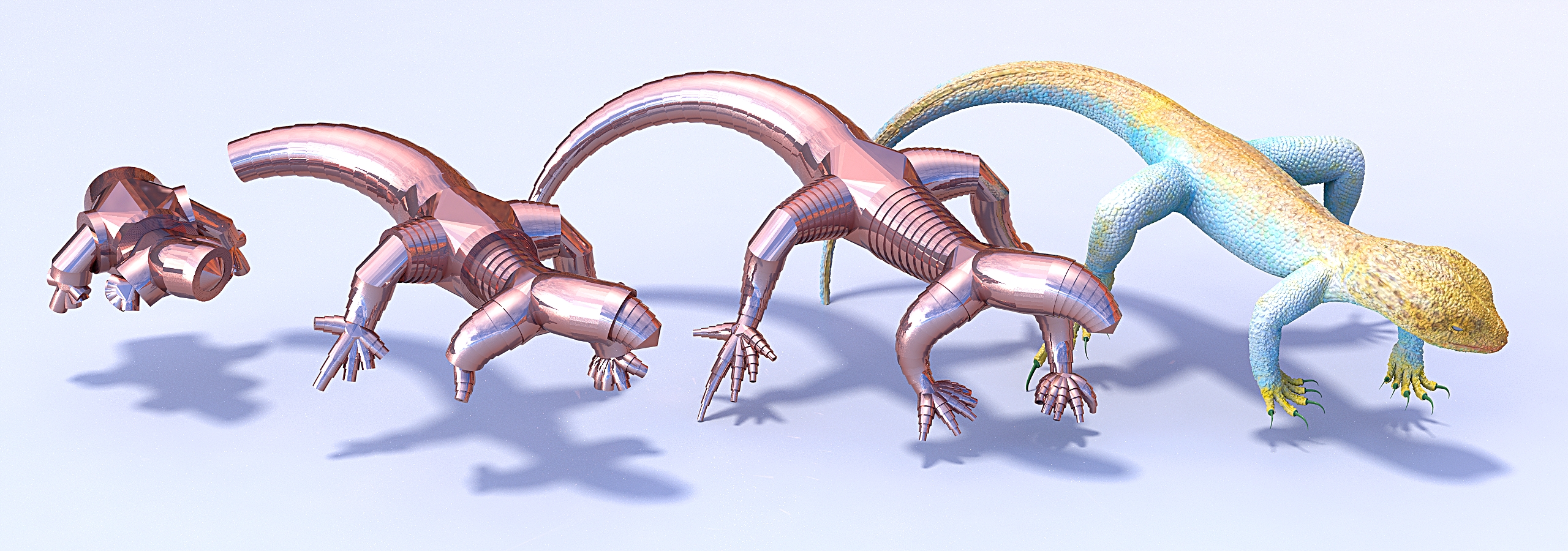
The researchers devised algorithms that can take a target shape that includes curves or twists and design a telescoping structure to match. They also created a design tool that enables even a novice to create complex, collapsible assemblies. The design possibilities range from something as practical as a rapidly deployable shelter to fanciful creations, such as a telescoping lizard with legs, head and tail that readily retract.
“Telescoping mechanisms are useful for designing deployable structures,” said Keenan Crane, assistant professor of computer science. “They can collapse down into really small volumes and, when you need them, are easily expanded.”
But most telescoping devices are similar to a pirate’s telescope — a set of straight, nested cylinders. In this study, Crane, along with Assistant Professor of Robotics Stelian Coros and computer science Ph.D. student Christopher Yu, set out to determine what kinds of telescoping shapes are possible, and to develop computational methods for designing and fabricating those shapes.
The researchers will present their findings at the SIGGRAPH Conference on Computer Graphics and Interactive Techniques, the world’s largest and most influential meeting on computer graphics and interactive techniques, July 30–Aug. 3 in Los Angeles.
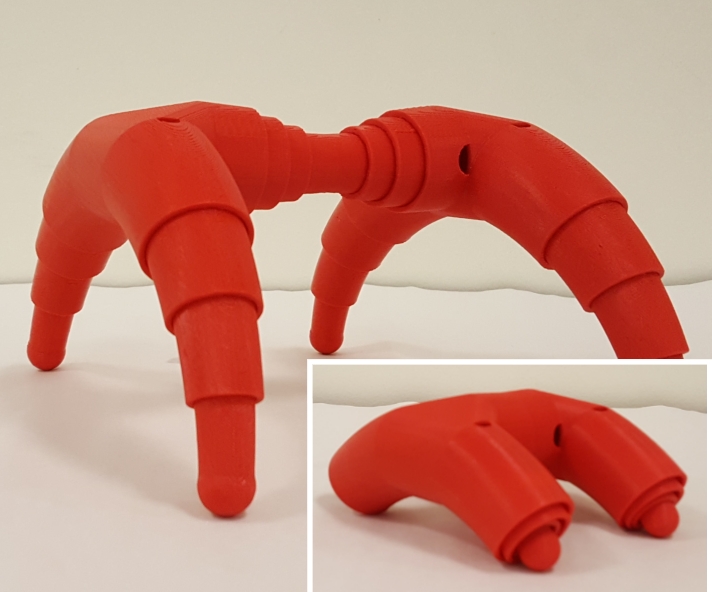
The research team found that spherical, ring-shaped and helical telescopes are possible. Once a designer selects the desired curve for a structure, their algorithms can devise a telescoping structure that can extend or contract without bumping into itself, and that includes no wasted space between the nested pieces. They also devised connectors that would combine several such telescopes into a larger assembly.
Though the nested sections can have a variety of cross sections, they focused on those with circular cross sections, just like the pirate’s spyglass. Once extended, they noted, the circular cross sections make it possible for each of the curved segments to rotate, adding 3-D twists to what otherwise would be 2-D shapes.
The researchers designed several prototypes — including a collapsible tent-like shelter, a reconfigurable arm and several branching joints — and made prototypes of them using 3-D printing. They explored a larger number of designs in simulation, including a hand, a reconfigurable vehicle, and several organic shapes mimicking lizards and other animals. Another was a robotic arm and claw that could emerge from a compact cylinder and reach up and over obstacles.
The simulations also enabled the researchers to analyze how the telescoping devices might move if they were actuated.
“We found that characters with telescoping parts are capable of surprisingly organic movements,” Coros said.
The National Science Foundation supported this research. The full paper and a video are available at http://graphics.cs.cmu.edu/?p=1278.