Course Overview
The complete and accurate schedule for current and upcoming robotics courses is maintained at the University level and can be accessed by visiting the university courses page. This page serves as an overview of courses taught within the Robotics department.
All courses with a “16-” prefix are offered by the Robotics department. Other departments offering courses taught by Robotics faculty are Computer Science (CS), Electrical and Computer Engineering (ECE), Mechanical Engineering (MechE), Statistics (Stat), Psychology (Psych), the Tepper School of Business (GSIA), and the Institute for Complex Engineered Systems (ICES).
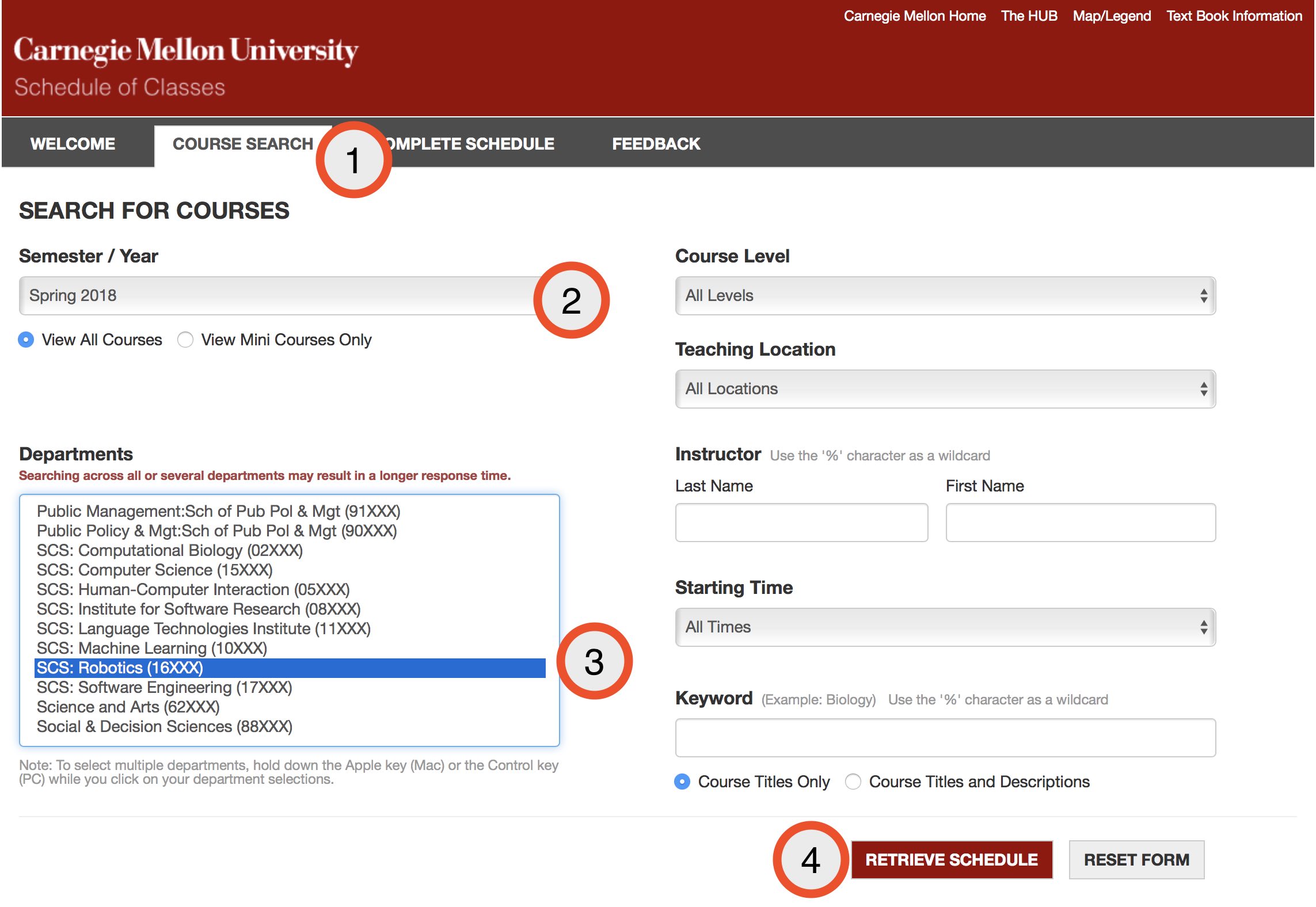
Finding Robotics 16-xxx Courses on the Registrar Site:
- Go to: Schedule of Classes Course Search.
- Select the “Semester/Year”
- Select “SCS: Robotics (16-xxx)” from the list of departments.
- Click “RETRIEVE SCHEDULE”
RI Courses
Graduate Courses
Course Description:
This course provides an overview of the current techniques that allow robots to locomote and interact with the world. The kinematics and dynamics of electromechanical systems will be covered with a particular focus on their application to robotic arms. Some basic principles of robot control will be discussed, ranging from independent- joint PID tracking to coupled computed torque approaches. The practice and theory of robotic mobility will be investigated through various mobile robot platforms, including wheeled and tracked vehicle and legged robots. Hands-on experience with some of the topics in the class will be provided through practical demonstrations and lab assignments. Please note that this course is for MRSD students only.
This course provides an overview of the current techniques that allow robots to locomote and interact with the world. The kinematics and dynamics of electromechanical systems will be covered with a particular focus on their application to robotic arms. Some basic principles of robot control will be discussed, ranging from independent- joint PID tracking to coupled computed torque approaches. The practice and theory of robotic mobility will be investigated through various mobile robot platforms, including wheeled and tracked vehicle and legged robots. Hands-on experience with some of the topics in the class will be provided through practical demonstrations and lab assignments. Please note that this course is for MRSD students only.
Prerequisites:
- MRSD students only
Course Description:
Practically everything around us is a system-from the cell phone in your pocket to the International Space System up in the sky. The higher the complexity of the system, the more its creators benefit from applying formal processes to its development-processes that are collectively known under the umbrella “systems engineering.” Systems Engineering is a formal discipline that guides a product from conception and design all the way to production, marketing, servicing, and disposal. In this course we will study the fundamental elements of systems engineering as they apply to the development of robotic systems. We will cover topics such as needs analysis, requirements elicitation and formalization, system architecture development, trade studies, verification and validation, etc. In addition, for this course we will cover core topics of Project Management that must be performed in tandem with Systems Engineering to achieve a successful project and product. For the Project Management we will cover work breakdown structures, scheduling, estimation, and risk management. We will study both classical and agile methods in project management. The students will apply most of the elements of this course in the MRSD Project Course I and II, thus giving them the opportunity to put the theory in practice in a real product design activity. Please note that this course is for MRSD students only. (Past project examples: http://mrsd.ri.cmu.edu/project-examples/)
Practically everything around us is a system-from the cell phone in your pocket to the International Space System up in the sky. The higher the complexity of the system, the more its creators benefit from applying formal processes to its development-processes that are collectively known under the umbrella “systems engineering.” Systems Engineering is a formal discipline that guides a product from conception and design all the way to production, marketing, servicing, and disposal. In this course we will study the fundamental elements of systems engineering as they apply to the development of robotic systems. We will cover topics such as needs analysis, requirements elicitation and formalization, system architecture development, trade studies, verification and validation, etc. In addition, for this course we will cover core topics of Project Management that must be performed in tandem with Systems Engineering to achieve a successful project and product. For the Project Management we will cover work breakdown structures, scheduling, estimation, and risk management. We will study both classical and agile methods in project management. The students will apply most of the elements of this course in the MRSD Project Course I and II, thus giving them the opportunity to put the theory in practice in a real product design activity. Please note that this course is for MRSD students only. (Past project examples: http://mrsd.ri.cmu.edu/project-examples/)
Course Description:
Robot autonomy delves into the interplay between perception, manipulation, navigation, planning, and learning required to develop fully autonomous systems. We will focus on application domains like the home, retail, and healthcare and identify common themes and key bottlenecks. We will discuss the state of the art algorithms, their computational and hardware requirements, and their limitations. To enable you to create end-to-end systems, you will learn how to address clutter and uncertainty in manipulation tasks, develop robust object recognition algorithms in real-world scenes, plan robot trajectories in high-dimensional spaces, build behavior engines for high-level tasks, and learn to apply and connect those to create an autonomous robot system. The course emphasizes the implementation of the algorithms discussed in class in simulation through homework assignments as well as on real systems in a class project.
Robot autonomy delves into the interplay between perception, manipulation, navigation, planning, and learning required to develop fully autonomous systems. We will focus on application domains like the home, retail, and healthcare and identify common themes and key bottlenecks. We will discuss the state of the art algorithms, their computational and hardware requirements, and their limitations. To enable you to create end-to-end systems, you will learn how to address clutter and uncertainty in manipulation tasks, develop robust object recognition algorithms in real-world scenes, plan robot trajectories in high-dimensional spaces, build behavior engines for high-level tasks, and learn to apply and connect those to create an autonomous robot system. The course emphasizes the implementation of the algorithms discussed in class in simulation through homework assignments as well as on real systems in a class project.
Prerequisites:
- 16-450
Course Description:
Kinematics, Dynamic Systems, and Control is a graduate level introduction to robotics. The course covers fundamental concepts and methods to analyze, model and control robotic mechanisms which move in the physical world and manipulate it. Main topics include the fundamentals of kinematics, dynamics and control applied to the kinematics, dynamics and control of rigid body chains. Additional topics include state estimation and dynamic parameter identification.
Kinematics, Dynamic Systems, and Control is a graduate level introduction to robotics. The course covers fundamental concepts and methods to analyze, model and control robotic mechanisms which move in the physical world and manipulate it. Main topics include the fundamentals of kinematics, dynamics and control applied to the kinematics, dynamics and control of rigid body chains. Additional topics include state estimation and dynamic parameter identification.
Course Description:
This course introduces the fundamental techniques used in computer vision, that is, the analysis of patterns in visual images to reconstruct and understand the objects and scenes that generated them. Topics covered include image formation and representation, camera geometry, and calibration, computational imaging, multi-view geometry, stereo, 3D reconstruction from images, motion analysis, physics-based vision, image segmentation and object recognition. The material is based on graduate-level texts augmented with research papers, as appropriate. Evaluation is based on homeworks and a final project. The homeworks involve considerable Matlab programming exercises.
This course introduces the fundamental techniques used in computer vision, that is, the analysis of patterns in visual images to reconstruct and understand the objects and scenes that generated them. Topics covered include image formation and representation, camera geometry, and calibration, computational imaging, multi-view geometry, stereo, 3D reconstruction from images, motion analysis, physics-based vision, image segmentation and object recognition. The material is based on graduate-level texts augmented with research papers, as appropriate. Evaluation is based on homeworks and a final project. The homeworks involve considerable Matlab programming exercises.
Books:
- Richard Szeliski, "Computer Vision Algorithms and Applications", Texts in Computer Science, Springer ISBN: 978-1-84882-934-3, Book Requirement: Recommended
- David Forsyth and Jean Ponce, "Computer Vision: A Modern Approach", Prentice Hall ISBN: 0-13-085198-1, Book Requirement: Recommended
Course Description:
The principles and practices of quantitative perception (sensing) illustrated by the devices and algorithms (sensors) that implement them. Learn to critically examine the sensing requirements of robotics applications, to specify the required sensor characteristics, to analyze whether these specifications can be realized even in principle, to compare what can be realized in principle to what can actually be purchased or built, to understand the engineering factors that account for the discrepancies, and to design transducing, digitizing, and computing systems that come tolerably close to realizing the actual capabilities of available sensors. Grading will be based on homework assignments, class participation, and a final exam. Three or four of the homework assignments will be hands-on “take-home labs” done with an Arduino kit that students will purchase in lieu of purchasing a textbook. Top-level course modules will cover (1) sensors, signals, and measurement science, (2) origins, nature, and amelioration of noise, (3) end-to-end sensing systems, (4) cameras and other imaging sensors and systems, (5) range sensing and imaging, (6) navigation sensors and systems, (7) other topics of interest to the class (as time allows).
The principles and practices of quantitative perception (sensing) illustrated by the devices and algorithms (sensors) that implement them. Learn to critically examine the sensing requirements of robotics applications, to specify the required sensor characteristics, to analyze whether these specifications can be realized even in principle, to compare what can be realized in principle to what can actually be purchased or built, to understand the engineering factors that account for the discrepancies, and to design transducing, digitizing, and computing systems that come tolerably close to realizing the actual capabilities of available sensors. Grading will be based on homework assignments, class participation, and a final exam. Three or four of the homework assignments will be hands-on “take-home labs” done with an Arduino kit that students will purchase in lieu of purchasing a textbook. Top-level course modules will cover (1) sensors, signals, and measurement science, (2) origins, nature, and amelioration of noise, (3) end-to-end sensing systems, (4) cameras and other imaging sensors and systems, (5) range sensing and imaging, (6) navigation sensors and systems, (7) other topics of interest to the class (as time allows).
Course Description:
Students will gain theoretical and practical skills in 2D, 3D, and 4D biomedical image analysis, including skills relevant to general image analysis. The fundamentals of computational medical image analysis will be explored, leading to current research in applying geometry and statistics to segmentation, registration, visualization, and image understanding. Additional and related covered topics include de-noising/restoration, morphology, level sets, and shape/feature analysis. Students will develop practical experience through projects using the latest version of the National Library of Medicine Insight Toolkit ( ITK ) and SimpleITK, a popular open-source software library developed by a consortium of institutions including Carnegie Mellon University and the University of Pittsburgh. In addition to image analysis, the course will include interaction with radiologists and pathologist(s). *** Lectures are at CMU and students will visit clinicians at UPMC. Some or all of the class lectures may also be videoed for public distribution, but students may request to be excluded from distributed video. 16-725 is a graduate class, and 16-425 is a cross-listed undergraduate section. 16-425 has substantially reduced requirements for the final project and for the larger homework assignments, nor does it require shadowing the clinicians.
Students will gain theoretical and practical skills in 2D, 3D, and 4D biomedical image analysis, including skills relevant to general image analysis. The fundamentals of computational medical image analysis will be explored, leading to current research in applying geometry and statistics to segmentation, registration, visualization, and image understanding. Additional and related covered topics include de-noising/restoration, morphology, level sets, and shape/feature analysis. Students will develop practical experience through projects using the latest version of the National Library of Medicine Insight Toolkit ( ITK ) and SimpleITK, a popular open-source software library developed by a consortium of institutions including Carnegie Mellon University and the University of Pittsburgh. In addition to image analysis, the course will include interaction with radiologists and pathologist(s). *** Lectures are at CMU and students will visit clinicians at UPMC. Some or all of the class lectures may also be videoed for public distribution, but students may request to be excluded from distributed video. 16-725 is a graduate class, and 16-425 is a cross-listed undergraduate section. 16-425 has substantially reduced requirements for the final project and for the larger homework assignments, nor does it require shadowing the clinicians.
Prerequisites:
- Knowledge of vector calculus, basic probability, and either C++ or python, including basic command-line familiarity and how to pass arguments to your own command-line programs. Extensive expertise with C++ and templates is not necessary, but some students may find it helpful.
Course Description:
This course introduces machine learning methods for image and video synthesis. The objectives of synthesis research vary from modeling statistical distributions of visual data, through realistic picture-perfect recreations of the world in graphics, and all the way to providing interactive tools for artistic expression. Key machine learning algorithms will be presented, ranging from classical learning methods (e.g., nearest neighbor, PCA, Markov Random Fields) to deep learning models (e.g., ConvNets, deep generative models, such as GANs and VAEs, Neural Radiance Fields). We will also introduce image and video forensics methods for detecting synthetic content. In this class, students will learn to build practical applications and create new visual effects using their own photos and videos.
This course introduces machine learning methods for image and video synthesis. The objectives of synthesis research vary from modeling statistical distributions of visual data, through realistic picture-perfect recreations of the world in graphics, and all the way to providing interactive tools for artistic expression. Key machine learning algorithms will be presented, ranging from classical learning methods (e.g., nearest neighbor, PCA, Markov Random Fields) to deep learning models (e.g., ConvNets, deep generative models, such as GANs and VAEs, Neural Radiance Fields). We will also introduce image and video forensics methods for detecting synthetic content. In this class, students will learn to build practical applications and create new visual effects using their own photos and videos.
Prerequisites:
- This course requires familiarity with basic concepts of computer vision/graphics/image processing (16385 or 15462 or 15463 or 16720 or 18793). Some knowledge of machine learning (10301 or 10315 or 10601 or 10606 or 10607 or 10701) will also be helpful.
Course Description:
Kinematics, statics, and dynamics of robotic manipulator’s interaction with a task, focusing on intelligent use of kinematic constraint, gravity, and frictional forces. Automatic planning based on mechanics. Application examples drawn from manufacturing and other domains.
Kinematics, statics, and dynamics of robotic manipulator’s interaction with a task, focusing on intelligent use of kinematic constraint, gravity, and frictional forces. Automatic planning based on mechanics. Application examples drawn from manufacturing and other domains.
Course Description:
This course surveys the use of optimization (especially optimal control) to design behavior. We will explore ways to represent policies including hand-designed parametric functions, basis functions, tables, and trajectory libraries. We will also explore algorithms to create policies including parameter optimization and trajectory optimization (first and second order gradient methods, sequential quadratic programming, random search methods, evolutionary algorithms, etc.). We will discuss how to handle the discrepancy between models used to create policies and the actual system being controlled (evaluation and robustness issues). The course will combine lectures, student-presented material, and projects. The goal of this course will be to help participants find the most effective methods for their problems.
This course surveys the use of optimization (especially optimal control) to design behavior. We will explore ways to represent policies including hand-designed parametric functions, basis functions, tables, and trajectory libraries. We will also explore algorithms to create policies including parameter optimization and trajectory optimization (first and second order gradient methods, sequential quadratic programming, random search methods, evolutionary algorithms, etc.). We will discuss how to handle the discrepancy between models used to create policies and the actual system being controlled (evaluation and robustness issues). The course will combine lectures, student-presented material, and projects. The goal of this course will be to help participants find the most effective methods for their problems.
Course Description:
This class will introduce concepts from a broad spectrum of constrained optimization, optimal and feasible motion planning, as well as machine learning all in the context of controlling complex, contemporary robotic systems. The specific systems on which we will focus include nominal examples from the nonlinear control literature (e.g., the constrained simple pendulum, the acrobat, cart-pole, etc.) all the way to the hybrid systems that underly much of the leading work on humanoid robots (e.g., the compass gait walker, the SLIP model, etc.). The course material will primarily consist of lecture notes as well as seminal papers from the robotics literature. By the end of this class you will be able to readily understand, implement, and adapt methods that span a wide spectrum that includes optimal control theory and reinforcement learning. People and animals move through and interact with the world in a fundamentally dynamic way. In the vast majority of cases the same cannot be said for robots. In fact, many conventional approaches to motion planning and robot control attempt to explicitly cancel out the dynamics associated with different tasks. This class will consider underactuated robots, systems that do not have full control over their state and therefore cannot be planned for or controlled via conventional methods. Our goal will be to make novel locomoting robots act more naturally. This class will highlight the relationship between conventional ideas from deterministic motion planning and control design (e.g., dynamic programming and linear-quadratic regulators) and their contemporary counterparts, many of which help form the analytical basis for the probabilisitic reasoning that underlies contemporary AI systems (e.g., POMDPs). Note that this course is inspired by and, for the most part, will follow the format of Underactuated Robotics: Learning, Planning, and Control for Efficient and Agile Machines created by Prof. Russ Tedrake at MIT. We will take several tangents, but the course materials provided by Prof. Tedrake through MIT Open Courseware are an incredible resource for this course (and really just in general).
This class will introduce concepts from a broad spectrum of constrained optimization, optimal and feasible motion planning, as well as machine learning all in the context of controlling complex, contemporary robotic systems. The specific systems on which we will focus include nominal examples from the nonlinear control literature (e.g., the constrained simple pendulum, the acrobat, cart-pole, etc.) all the way to the hybrid systems that underly much of the leading work on humanoid robots (e.g., the compass gait walker, the SLIP model, etc.). The course material will primarily consist of lecture notes as well as seminal papers from the robotics literature. By the end of this class you will be able to readily understand, implement, and adapt methods that span a wide spectrum that includes optimal control theory and reinforcement learning. People and animals move through and interact with the world in a fundamentally dynamic way. In the vast majority of cases the same cannot be said for robots. In fact, many conventional approaches to motion planning and robot control attempt to explicitly cancel out the dynamics associated with different tasks. This class will consider underactuated robots, systems that do not have full control over their state and therefore cannot be planned for or controlled via conventional methods. Our goal will be to make novel locomoting robots act more naturally. This class will highlight the relationship between conventional ideas from deterministic motion planning and control design (e.g., dynamic programming and linear-quadratic regulators) and their contemporary counterparts, many of which help form the analytical basis for the probabilisitic reasoning that underlies contemporary AI systems (e.g., POMDPs). Note that this course is inspired by and, for the most part, will follow the format of Underactuated Robotics: Learning, Planning, and Control for Efficient and Agile Machines created by Prof. Russ Tedrake at MIT. We will take several tangents, but the course materials provided by Prof. Tedrake through MIT Open Courseware are an incredible resource for this course (and really just in general).
Course Description:
This course covers all aspects of mobile robot systems design and programming from both a theoretical and a practical perspective. The basic subsystems of control, localization, mapping, perception, and planning are presented. For each, the discussion will include relevant methods from applied mathematics. aspects of physics necessary in the construction of models of system and environmental behavior, and core algorithms which have proven to be valuable in a wide range of circumstances.
This course covers all aspects of mobile robot systems design and programming from both a theoretical and a practical perspective. The basic subsystems of control, localization, mapping, perception, and planning are presented. For each, the discussion will include relevant methods from applied mathematics. aspects of physics necessary in the construction of models of system and environmental behavior, and core algorithms which have proven to be valuable in a wide range of circumstances.
Course Description:
Mechatronics is the synergistic integration of mechanism, electronics, and computer control to achieve a functional system. This course is a semester-long multidisciplinary capstone hardware project design experience in which small (typically four-person) teams of electrical and computer engineering, mechanical engineering and robotics students deliver an end-of-course demonstration of a final integrated system capable of performing a mechatronic task. Throughout the semester, the students design, configure, implement, test and evaluate in the laboratory devices and subsystems culminating in the final integrated mechatronic system. Lectures will complement the laboratory experience with comparative surveys, operational principles, and integrated design issues associated with the spectrum of mechanism, microcontroller, electronic, sensor, and control components. CROSS-LISTED COURSES: 18-578, 24-778
Mechatronics is the synergistic integration of mechanism, electronics, and computer control to achieve a functional system. This course is a semester-long multidisciplinary capstone hardware project design experience in which small (typically four-person) teams of electrical and computer engineering, mechanical engineering and robotics students deliver an end-of-course demonstration of a final integrated system capable of performing a mechatronic task. Throughout the semester, the students design, configure, implement, test and evaluate in the laboratory devices and subsystems culminating in the final integrated mechatronic system. Lectures will complement the laboratory experience with comparative surveys, operational principles, and integrated design issues associated with the spectrum of mechanism, microcontroller, electronic, sensor, and control components. CROSS-LISTED COURSES: 18-578, 24-778
Course Description:
Planning and Decision-making are critical components of autonomy in robotic systems. These components are responsible for making decisions that range from path planning and motion planning to coverage and task planning to taking actions that help robots understand the world around them better. This course studies underlying algorithmic techniques used for planning and decision-making in robotics and examines case studies in ground and aerial robots, humanoids, mobile manipulation platforms and multi-robot systems. The students will learn the algorithms and implement them in a series of programming-based projects.
Planning and Decision-making are critical components of autonomy in robotic systems. These components are responsible for making decisions that range from path planning and motion planning to coverage and task planning to taking actions that help robots understand the world around them better. This course studies underlying algorithmic techniques used for planning and decision-making in robotics and examines case studies in ground and aerial robots, humanoids, mobile manipulation platforms and multi-robot systems. The students will learn the algorithms and implement them in a series of programming-based projects.
Course Description:
This course covers the topics on building cognitive intelligence for robotic systems. Cognitive capabilities constitute high-level, humanlike intelligence that exhibits reasoning or problem solving skills. Such capabilities as semantic perception, language understanding, and task planning can be built on top of low-level robot autonomy that enables autonomous control of physical platforms. The topics generally bridge across multiple technical areas, for example, vision-language intersection and language-action/plan grounding. This course is composed of 50 lectures and 50 seminar classes.
This course covers the topics on building cognitive intelligence for robotic systems. Cognitive capabilities constitute high-level, humanlike intelligence that exhibits reasoning or problem solving skills. Such capabilities as semantic perception, language understanding, and task planning can be built on top of low-level robot autonomy that enables autonomous control of physical platforms. The topics generally bridge across multiple technical areas, for example, vision-language intersection and language-action/plan grounding. This course is composed of 50 lectures and 50 seminar classes.
Prerequisites:
- There are no explicit prerequisites for this class, but a general background knowledge in AI and machine learning is assumed.
Course Description:
This course explores the rapidly developing field of data science in the context of its pragmatic applications. Applied Data Science strives to achieve three main goals. The first is to optimize the efficacy of decision making by human managers. The second is to maximize the utilization of available data, so that no important clue is ever missed. The third is to improve understanding of data and the underlying processes that produce it. This course aims at building skills required to systematically achieve those goals in practice. The students will gain and solidify awareness of the most prevalent contemporary methods of Data Science, and develop intuition needed for assessing practical utility of the studied topics in application scenarios. They will be able to learn how to formulate analytic tasks in support of project objectives, how to define successful analytic projects, and how to evaluate utility of existing and potential applications of the discussed technologies in practice.
This course explores the rapidly developing field of data science in the context of its pragmatic applications. Applied Data Science strives to achieve three main goals. The first is to optimize the efficacy of decision making by human managers. The second is to maximize the utilization of available data, so that no important clue is ever missed. The third is to improve understanding of data and the underlying processes that produce it. This course aims at building skills required to systematically achieve those goals in practice. The students will gain and solidify awareness of the most prevalent contemporary methods of Data Science, and develop intuition needed for assessing practical utility of the studied topics in application scenarios. They will be able to learn how to formulate analytic tasks in support of project objectives, how to define successful analytic projects, and how to evaluate utility of existing and potential applications of the discussed technologies in practice.
Course Description:
This course covers selected topics in applied mathematics useful in robotics, taken from the following list: 1. Solution of Linear Equations. 2. Polynomial Interpolation and Approximation. 3. Solution of Nonlinear Equations. 4. Roots of Polynomials, Resultants. 5. Approximation by Orthogonal Functions (includes Fourier series). 6. Integration of Ordinary Differential Equations. 7. Optimization. 8. Calculus of Variations (with applications to Mechanics). 9. Probability and Stochastic Processes (Markov chains). 10. Computational Geometry. 11. Differential Geometry.
This course covers selected topics in applied mathematics useful in robotics, taken from the following list: 1. Solution of Linear Equations. 2. Polynomial Interpolation and Approximation. 3. Solution of Nonlinear Equations. 4. Roots of Polynomials, Resultants. 5. Approximation by Orthogonal Functions (includes Fourier series). 6. Integration of Ordinary Differential Equations. 7. Optimization. 8. Calculus of Variations (with applications to Mechanics). 9. Probability and Stochastic Processes (Markov chains). 10. Computational Geometry. 11. Differential Geometry.
Course Description:
The course focuses on the geometric aspects of computer vision: The geometry of image formation and its use for 3D reconstruction and calibration. The objective of the course is to introduce the formal tools and results that are necessary for developing multi-view reconstruction algorithms. The fundamental tools introduced study affine and projective geometry, which are essential to the development of image formation models. Additional algebraic tools, such as exterior algebras are also introduced at the beginning of the course. These tools are then used to develop formal models of geometric image formation for a single view (camera model), two views (fundamental matrix), and three views (trifocal tensor); 3D reconstruction from multiple images; and auto-calibration.
The course focuses on the geometric aspects of computer vision: The geometry of image formation and its use for 3D reconstruction and calibration. The objective of the course is to introduce the formal tools and results that are necessary for developing multi-view reconstruction algorithms. The fundamental tools introduced study affine and projective geometry, which are essential to the development of image formation models. Additional algebraic tools, such as exterior algebras are also introduced at the beginning of the course. These tools are then used to develop formal models of geometric image formation for a single view (camera model), two views (fundamental matrix), and three views (trifocal tensor); 3D reconstruction from multiple images; and auto-calibration.
Prerequisites:
- Computer Vision (16-721 or equivalent)
Books:
- The Geometry of Multiple Images. Faugeras and Long, MIT Press., Book Requirement: Not Specified
- Multiple View Geometry in Computer Vision, Richard Hartley and Andrew Zisserman, Cambridge University Press, June 2000., Book Requirement: Not Specified
Topics Covered:
- Fundamentals of projective, affine, and Euclidean geometries
- Invariance and duality
- Algebraic tools
- Single view geometry: The pinhole model
- Calibration techniques
- 2-view geometry: The Fundamental matrix
- 2-view reconstruction
- 3-view geometry: The trifocal tensor
- Parameter estimation and uncertainty
- n-view reconstruction
- Self-calibration
Course Description:
Everyday we observe an extraordinary array of light and color phenomena around us, ranging from the dazzling effects of the atmosphere, the complex appearances of surfaces and materials and underwater scenarios. For a long time, artists, scientists and photographers have been fascinated by these effects, and have focused their attention on capturing and understanding these phenomena. In this course, we take a computational approach to modeling and analyzing these phenomena, which we collectively call as “visual appearance”. The first half of the course focuses on the physical fundamentals of visual appearance, while the second half of the course focuses on algorithms and applications in a variety of fields such as computer vision, graphics and remote sensing and technologies such as underwater and aerial imaging. This course unifies concepts usually learnt in physical sciences and their application in imaging sciences, and will include the latest research advances in this area. The course will also include a photography competition.
Everyday we observe an extraordinary array of light and color phenomena around us, ranging from the dazzling effects of the atmosphere, the complex appearances of surfaces and materials and underwater scenarios. For a long time, artists, scientists and photographers have been fascinated by these effects, and have focused their attention on capturing and understanding these phenomena. In this course, we take a computational approach to modeling and analyzing these phenomena, which we collectively call as “visual appearance”. The first half of the course focuses on the physical fundamentals of visual appearance, while the second half of the course focuses on algorithms and applications in a variety of fields such as computer vision, graphics and remote sensing and technologies such as underwater and aerial imaging. This course unifies concepts usually learnt in physical sciences and their application in imaging sciences, and will include the latest research advances in this area. The course will also include a photography competition.
Prerequisites:
- An undergraduate or graduate class in Computer Vision or in Computer Graphics
Course Description:
A graduate seminar course in Computer Vision with emphasis on representation and reasoning for large amounts of data (images, videos and associated tags, text, gps-locations etc) toward the ultimate goal of Image Understanding. We will be reading an eclectic mix of classic and recent papers on topics including: Theories of Perception, Mid-level Vision (Grouping, Segmentation, Poselets), Object and Scene Recognition, 3D Scene Understanding, Action Recognition, Contextual Reasoning, Image Parsing, Joint Language and Vision Models, etc. We will be covering a wide range of supervised, semi-supervised and unsupervised approaches for each of the topics above.
A graduate seminar course in Computer Vision with emphasis on representation and reasoning for large amounts of data (images, videos and associated tags, text, gps-locations etc) toward the ultimate goal of Image Understanding. We will be reading an eclectic mix of classic and recent papers on topics including: Theories of Perception, Mid-level Vision (Grouping, Segmentation, Poselets), Object and Scene Recognition, 3D Scene Understanding, Action Recognition, Contextual Reasoning, Image Parsing, Joint Language and Vision Models, etc. We will be covering a wide range of supervised, semi-supervised and unsupervised approaches for each of the topics above.
Prerequisites:
- Graduate Computer Vision or Machine Learning course
Course Description:
Data-driven learning techniques are now an essential part of building robotic systems designed to operate in the real world. These systems must learn to adapt to changes in the environment, learn from experience, and learn from demonstration. In particular we will cover three important sub-fields of Machine Learning applied to robotic systems: (1) We will cover Online Learning, which can be used to give robotic systems the ability to adapt to changing environmental conditions. (2) We will cover Reinforcement Learning, which takes into account the tradeoffs between exploration and exploitation to learn how to interact with the environment. We will also cover Deep Reinforcement Learning techniques in the context of real-world robotic systems. (3) We will cover Apprenticeship Learning (Imitation Learning and Inverse Reinforcement Learning) which is critical for teaching robotic systems to learn from expert behavior. Prerequisites: Linear Algebra, Multivariate Calculus, Probability theory.
Data-driven learning techniques are now an essential part of building robotic systems designed to operate in the real world. These systems must learn to adapt to changes in the environment, learn from experience, and learn from demonstration. In particular we will cover three important sub-fields of Machine Learning applied to robotic systems: (1) We will cover Online Learning, which can be used to give robotic systems the ability to adapt to changing environmental conditions. (2) We will cover Reinforcement Learning, which takes into account the tradeoffs between exploration and exploitation to learn how to interact with the environment. We will also cover Deep Reinforcement Learning techniques in the context of real-world robotic systems. (3) We will cover Apprenticeship Learning (Imitation Learning and Inverse Reinforcement Learning) which is critical for teaching robotic systems to learn from expert behavior. Prerequisites: Linear Algebra, Multivariate Calculus, Probability theory.
Course Description:
Robot localization and mapping are fundamental capabilities for mobile robots operating in the real world. Even more challenging than these individual problems is their combination: simultaneous localization and mapping (SLAM). Robust and scalable solutions are needed that can handle the uncertainty inherent in sensor measurements, while providing localization and map estimates in real-time. We will explore suitable efficient probabilistic inference algorithms at the intersection of linear algebra and probabilistic graphical models. We will also explore state-of-the-art systems.
Robot localization and mapping are fundamental capabilities for mobile robots operating in the real world. Even more challenging than these individual problems is their combination: simultaneous localization and mapping (SLAM). Robust and scalable solutions are needed that can handle the uncertainty inherent in sensor measurements, while providing localization and map estimates in real-time. We will explore suitable efficient probabilistic inference algorithms at the intersection of linear algebra and probabilistic graphical models. We will also explore state-of-the-art systems.
Topics Covered:
- simultaneous localization and mapping (SLAM)
Course Description:
This is an advanced graduate-level class on the theory and algorithms that enable robots to physically manipulate their world, on their own or in collaboration with people. The class will first focus on functional aspects of manipulation, such as synthesizing robust and stable grasps for dexterous hands and motion planning in these spaces, as well as learning for manipulation, such as how to predict stable grasps from demonstration and experience. Moving forward, we will discuss additional requirements that arise from performing manipulation tasks collaboratively with people: moving from purely functional aspects of motion to incorporating the human into the loop, and coordinating human and robot actions via understanding and expressing intent.
This is an advanced graduate-level class on the theory and algorithms that enable robots to physically manipulate their world, on their own or in collaboration with people. The class will first focus on functional aspects of manipulation, such as synthesizing robust and stable grasps for dexterous hands and motion planning in these spaces, as well as learning for manipulation, such as how to predict stable grasps from demonstration and experience. Moving forward, we will discuss additional requirements that arise from performing manipulation tasks collaboratively with people: moving from purely functional aspects of motion to incorporating the human into the loop, and coordinating human and robot actions via understanding and expressing intent.
Course Description:
This course will cover all facets of modeling, design, fabrication, and analysis of robots operating on the insect scale, from a micro-robotics perspective. Insects can perform different tasks with their small-scale bodies varying from200μm to 20cm in length. Similarly, we can define a micro-robotic system as an autonomous/semi-autonomous device with features on the micron scale or make use of micron-scale physics for mobility or manipulation of objects. Due to their small sizes, microrobots will encounter difficulties, unlike their macro-scale counterparts. In this project-based course, our aim will be on learning the physics of scaling, fabrication paradigms, actuation and sensing strategies, with numerous case studies, and to build an insect-inspired robotic system. We will also discuss multiple applications such as surgical robotics, mobile micro-robots, multi-agent systems, and micro/nanomanipulation.
This course will cover all facets of modeling, design, fabrication, and analysis of robots operating on the insect scale, from a micro-robotics perspective. Insects can perform different tasks with their small-scale bodies varying from200μm to 20cm in length. Similarly, we can define a micro-robotic system as an autonomous/semi-autonomous device with features on the micron scale or make use of micron-scale physics for mobility or manipulation of objects. Due to their small sizes, microrobots will encounter difficulties, unlike their macro-scale counterparts. In this project-based course, our aim will be on learning the physics of scaling, fabrication paradigms, actuation and sensing strategies, with numerous case studies, and to build an insect-inspired robotic system. We will also discuss multiple applications such as surgical robotics, mobile micro-robots, multi-agent systems, and micro/nanomanipulation.
Course Description:
Research related to hands has increased dramatically over the past decade. Hands are in focus in computer graphics and virtual reality, new robot hands have been popping up in great variety, and manipulation has been featured in widely publicized programs such as the DARPA Robotics Challenge. With all of this attention on hands, are we close to a breakthrough in dexterity, or are we still missing some things needed for truly competent manipulation? In this course, we will survey robotic hands and learn about the human hand with the goal of pushing the frontiers on hand design and control for dexterous manipulation. We will consider the necessary kinematics and dynamics for dexterity, what sensors are required to carry out dexterous interactions, the importance of reflexes and compliance, and the challenge of uncertainty. We will examine the human hand: its structure, sensing capabilities, human grasp choice and control strategies for inspiration and benchmarking. Students will be asked to present one or two research papers, participate in discussions and short research or design exercises, and carry out a final project.
Research related to hands has increased dramatically over the past decade. Hands are in focus in computer graphics and virtual reality, new robot hands have been popping up in great variety, and manipulation has been featured in widely publicized programs such as the DARPA Robotics Challenge. With all of this attention on hands, are we close to a breakthrough in dexterity, or are we still missing some things needed for truly competent manipulation? In this course, we will survey robotic hands and learn about the human hand with the goal of pushing the frontiers on hand design and control for dexterous manipulation. We will consider the necessary kinematics and dynamics for dexterity, what sensors are required to carry out dexterous interactions, the importance of reflexes and compliance, and the challenge of uncertainty. We will examine the human hand: its structure, sensing capabilities, human grasp choice and control strategies for inspiration and benchmarking. Students will be asked to present one or two research papers, participate in discussions and short research or design exercises, and carry out a final project.
Course Description:
This course investigates robot mobility, energetics, sensing, computing, software, payload, interface, and operating environment. The context is robotic pursuit of the Moon. Scope incorporates mechanism, electronics, software, locomotion, navigation, communication, sensing, power and thermal considerations. Additionally, space systems address challenges of low mass, energetics, space environment, and reliability of design. Media is incorporated to chronicle and represent the accomplishments. The course is appropriate for a broad range of student disciplines and interests. Course Learning Objectives include formulation, problem solving, robotics and developing space systems . Students work cooperatively in teams with guidance to produce mission-relevant results and practice technical communications through written and oral presentations. Teams generate term papers detailing the design, development, testing and lessons learned.
This course investigates robot mobility, energetics, sensing, computing, software, payload, interface, and operating environment. The context is robotic pursuit of the Moon. Scope incorporates mechanism, electronics, software, locomotion, navigation, communication, sensing, power and thermal considerations. Additionally, space systems address challenges of low mass, energetics, space environment, and reliability of design. Media is incorporated to chronicle and represent the accomplishments. The course is appropriate for a broad range of student disciplines and interests. Course Learning Objectives include formulation, problem solving, robotics and developing space systems . Students work cooperatively in teams with guidance to produce mission-relevant results and practice technical communications through written and oral presentations. Teams generate term papers detailing the design, development, testing and lessons learned.
Course Description:
This course will develop the robot that CMU will drive on the moon to win the Lunar XPrize while mentoring the tributary technologies and creative process. The course will also claim the first cash from Google’s Lunar Milestone Prize by demonstrating flight readiness of the rover. The tributary technologies addressed in this course include mechanisms, actuation, thermal regulation, power, sensing, computing, communication, and operations. Process includes robot development and verification of functionality, reliability, and flight readiness. Relevant skills include robotics, mechanics, electronics, software, fabrication, testing, documentation, and systems engineering. The course is appropriate for a broad range of interests and experience.
This course will develop the robot that CMU will drive on the moon to win the Lunar XPrize while mentoring the tributary technologies and creative process. The course will also claim the first cash from Google’s Lunar Milestone Prize by demonstrating flight readiness of the rover. The tributary technologies addressed in this course include mechanisms, actuation, thermal regulation, power, sensing, computing, communication, and operations. Process includes robot development and verification of functionality, reliability, and flight readiness. Relevant skills include robotics, mechanics, electronics, software, fabrication, testing, documentation, and systems engineering. The course is appropriate for a broad range of interests and experience.
Course Description:
The course provides an introduction into the mechanics and control of legged locomotion with a focus on the human system. The main topics covered include fundamental concepts, muscle-skeleton mechanics, and neural control. Examples of bio-inspiration in robots and rehabilitation devices are highlighted. By the end of the course, you will have the basic knowledge to build your own dynamic an control models of animal and human motions. The course develops the material in parallel with an introduction into Matlab’s Simulink and SimMechanics environments for modeling nonlinear dynamic systems. Assignments and team projects will let you apply your knowledge to problems of animal and human motion in theory and computer simulations.
The course provides an introduction into the mechanics and control of legged locomotion with a focus on the human system. The main topics covered include fundamental concepts, muscle-skeleton mechanics, and neural control. Examples of bio-inspiration in robots and rehabilitation devices are highlighted. By the end of the course, you will have the basic knowledge to build your own dynamic an control models of animal and human motions. The course develops the material in parallel with an introduction into Matlab’s Simulink and SimMechanics environments for modeling nonlinear dynamic systems. Assignments and team projects will let you apply your knowledge to problems of animal and human motion in theory and computer simulations.
Undergraduate Courses
Course Description:
Physical computing refers to the design and construction of physical systems that use a mix of software and hardware to sense and respond to the surrounding world. Such systems blend digital and physical processes into toys and gadgets, kinetic sculpture, functional sensing and assessment tools, mobile instruments, interactive wearables, and more. This is a project-based course that deals with all aspects of conceiving, designing and developing projects with physical computing: the application, the artifact, the computer-aided design environment, and the physical prototyping facilities. The course is organized around a series of practical hands-on exercises which introduce the fundamentals of circuits, embedded programming, sensor signal processing, simple mechanisms, actuation, and time-based behavior. The key objective is gaining an intuitive understanding of how information and energy move between the physical, electronic, and computational domains to create a desired behavior. The exercises provide building blocks for collaborative projects which utilize the essential skills and challenge students to not only consider how to make things, but also for whom we design, and why the making is worthwhile. This course is an IDeATe Portal Course for entry into either of the IDeATe Intelligent Environments or Physical Computing programs. CFA/DC/TPR students can enroll under 16-223; CIT/MCS/SCS students can enroll in the 60-223 version of the course. Please note that there will be lab usage and materials fees associated with this course.
Physical computing refers to the design and construction of physical systems that use a mix of software and hardware to sense and respond to the surrounding world. Such systems blend digital and physical processes into toys and gadgets, kinetic sculpture, functional sensing and assessment tools, mobile instruments, interactive wearables, and more. This is a project-based course that deals with all aspects of conceiving, designing and developing projects with physical computing: the application, the artifact, the computer-aided design environment, and the physical prototyping facilities. The course is organized around a series of practical hands-on exercises which introduce the fundamentals of circuits, embedded programming, sensor signal processing, simple mechanisms, actuation, and time-based behavior. The key objective is gaining an intuitive understanding of how information and energy move between the physical, electronic, and computational domains to create a desired behavior. The exercises provide building blocks for collaborative projects which utilize the essential skills and challenge students to not only consider how to make things, but also for whom we design, and why the making is worthwhile. This course is an IDeATe Portal Course for entry into either of the IDeATe Intelligent Environments or Physical Computing programs. CFA/DC/TPR students can enroll under 16-223; CIT/MCS/SCS students can enroll in the 60-223 version of the course. Please note that there will be lab usage and materials fees associated with this course.
Course Description:
This course surveys perception, cognition, and movement in humans, humanoid robots, and humanoid graphical characters. Application areas include more human-like robots, video game characters, and interactive movie characters.
This course surveys perception, cognition, and movement in humans, humanoid robots, and humanoid graphical characters. Application areas include more human-like robots, video game characters, and interactive movie characters.
Course Description:
This course is designed as a first course in feedback control systems for computer science majors. Course topics include classical linear control theory (differential equations, Laplace transforms, feedback control), linear state-space methods (controllability/observability, pole placement, LQR), nonlinear systems theory, and an introduction to control using computer learning techniques. Priorities will be given to computer science majors with robotics minor.
This course is designed as a first course in feedback control systems for computer science majors. Course topics include classical linear control theory (differential equations, Laplace transforms, feedback control), linear state-space methods (controllability/observability, pole placement, LQR), nonlinear systems theory, and an introduction to control using computer learning techniques. Priorities will be given to computer science majors with robotics minor.
Prerequisites:
- 15122
- 21122
Course Description:
This course presents an overview of robotics in practice and research with topics including vision, motion planning, mobile mechanisms, kinematics, inverse kinematics, and sensors. In course projects, students construct robots which are driven by a microcontroller, with each project reinforcing the basic principles developed in lectures. Students nominally work in teams of three: an electrical engineer, a mechanical engineer, and a computer scientist. This course will also expose students to some of the contemporary happenings in robotics, which includes current robot lab research, applications, robot contests and robots in the news.
This course presents an overview of robotics in practice and research with topics including vision, motion planning, mobile mechanisms, kinematics, inverse kinematics, and sensors. In course projects, students construct robots which are driven by a microcontroller, with each project reinforcing the basic principles developed in lectures. Students nominally work in teams of three: an electrical engineer, a mechanical engineer, and a computer scientist. This course will also expose students to some of the contemporary happenings in robotics, which includes current robot lab research, applications, robot contests and robots in the news.
Course Description:
Planning is one of the core components that enable robots to be autonomous. Robot planning is responsible for deciding in real-time what should the robot do next, how to do it, where should the robot move next and how to move there. This class does an in-depth study of popular planning techniques in robotics and examines their use in ground and aerial robots, humanoids, mobile manipulation platforms and multi-robot systems. The students learn the theory of these methods and also implement them in a series of programming-based projects. To take the class students should have taken an Intro to Robotics class and have a good knowledge of programming and data structures.
Planning is one of the core components that enable robots to be autonomous. Robot planning is responsible for deciding in real-time what should the robot do next, how to do it, where should the robot move next and how to move there. This class does an in-depth study of popular planning techniques in robotics and examines their use in ground and aerial robots, humanoids, mobile manipulation platforms and multi-robot systems. The students learn the theory of these methods and also implement them in a series of programming-based projects. To take the class students should have taken an Intro to Robotics class and have a good knowledge of programming and data structures.
Prerequisites:
- Introduction to Robotics
Course Description:
This course is a comprehensive hands-on introduction to the concepts and basic algorithms needed to make a mobile robot function reliably and effectively. We will work in small groups with small robots that are controlled over wireless from your laptop computers. The robots are custom-designed mini forktrucks that can move pallets from place to place just like commercial automated guided vehicles do today. The robots are programmed in the modern MATLAB programming environment. It is a pretty easy language to learn, and a very powerful one for prototyping robotics algorithms. You will get a lot of experience in this course in addition to some theory. Lectures are focused on the content of the next lab. There is a lab every week and they build on each other so that a complete robot software system results. The course will culminate with a class-wide robot competition that tests the performance of all of your code implemented in the semester. In order to succeed in the course, students must have a 1) 2nd year science/engineering level background in mathematics (matrices, vectors, coordinate systems) and 2) have already mastered at least one procedural programming language like C or Java, and 3) have enough experience to be reasonably prepared to write a 5000 line software system in 13 weeks with the help of one or two others. When the course is over, you will have written a single software system that has been incrementally extended in functionality and regularly debugged throughout the semester.
This course is a comprehensive hands-on introduction to the concepts and basic algorithms needed to make a mobile robot function reliably and effectively. We will work in small groups with small robots that are controlled over wireless from your laptop computers. The robots are custom-designed mini forktrucks that can move pallets from place to place just like commercial automated guided vehicles do today. The robots are programmed in the modern MATLAB programming environment. It is a pretty easy language to learn, and a very powerful one for prototyping robotics algorithms. You will get a lot of experience in this course in addition to some theory. Lectures are focused on the content of the next lab. There is a lab every week and they build on each other so that a complete robot software system results. The course will culminate with a class-wide robot competition that tests the performance of all of your code implemented in the semester. In order to succeed in the course, students must have a 1) 2nd year science/engineering level background in mathematics (matrices, vectors, coordinate systems) and 2) have already mastered at least one procedural programming language like C or Java, and 3) have enough experience to be reasonably prepared to write a 5000 line software system in 13 weeks with the help of one or two others. When the course is over, you will have written a single software system that has been incrementally extended in functionality and regularly debugged throughout the semester.
Course Description:
Inspired by the early trick films of George Melies, this project-oriented course brings together robotics and film production technique to infuse cinema with the wonder of live magic. Students will learn the basics of film production using animatronics, camera motion control, and compositing. The projects apply these techniques to create innovative physical effects for short films, all the way from concept to post-production. The course emphasizes real-time practical effects to explore the immediacy and interactivity of improvisation and rehearsal. The robotics topics include animatronic rapid prototyping and programming human-robot collaborative performance. The course includes a brief overview of the history of special effects and robotics to set the work in context. CROSS-LISTED COURSE: 60428
Inspired by the early trick films of George Melies, this project-oriented course brings together robotics and film production technique to infuse cinema with the wonder of live magic. Students will learn the basics of film production using animatronics, camera motion control, and compositing. The projects apply these techniques to create innovative physical effects for short films, all the way from concept to post-production. The course emphasizes real-time practical effects to explore the immediacy and interactivity of improvisation and rehearsal. The robotics topics include animatronic rapid prototyping and programming human-robot collaborative performance. The course includes a brief overview of the history of special effects and robotics to set the work in context. CROSS-LISTED COURSE: 60428
Course Description:
[IDeATe collaborative course]. This project-oriented course brings art and engineering together into making machines which are surprisingly animate. Students will iterate their concepts through several small projects focused on using embodied behavior as a creative medium for storytelling, performance, and human interaction. Students will learn skills for designing, constructing and programming simple robot systems, then exploring their results through exhibition and performance. Technical topics include systems thinking, dynamic physical and computational behavior, autonomy, embedded programming, and fabrication and deployment. Discussion topics include both contemporary kinetic sculpture and robotics research. Please note that there may be usage/materials fees associated with this course. CROSS-LISTED COURSES: 54375
[IDeATe collaborative course]. This project-oriented course brings art and engineering together into making machines which are surprisingly animate. Students will iterate their concepts through several small projects focused on using embodied behavior as a creative medium for storytelling, performance, and human interaction. Students will learn skills for designing, constructing and programming simple robot systems, then exploring their results through exhibition and performance. Technical topics include systems thinking, dynamic physical and computational behavior, autonomy, embedded programming, and fabrication and deployment. Discussion topics include both contemporary kinetic sculpture and robotics research. Please note that there may be usage/materials fees associated with this course. CROSS-LISTED COURSES: 54375
Prerequisites:
- 62150 or 60223 or 15104 or 16223
Course Description:
Foundations and principles of robotic kinematics. Topics include transformations, forward kinematics, inverse kinematics, differential kinematics (Jacobians), manipulability, and basic equations of motion. Course also include programming on robot arms.
Foundations and principles of robotic kinematics. Topics include transformations, forward kinematics, inverse kinematics, differential kinematics (Jacobians), manipulability, and basic equations of motion. Course also include programming on robot arms.
Topics Covered:
- transformations
- forward kinematics
- inverse kinematics
- differential kinematics (Jacobians)
- manipulability
- basic equations of motion
Course Description:
This course provides a comprehensive introduction to computer vision. Major topics include image processing, detection and recognition, geometry-based and physics-based vision, sensing and perception, and video analysis. Students will learn basic concepts of computer vision as well as hands on experience to solve real-life vision problems.
This course provides a comprehensive introduction to computer vision. Major topics include image processing, detection and recognition, geometry-based and physics-based vision, sensing and perception, and video analysis. Students will learn basic concepts of computer vision as well as hands on experience to solve real-life vision problems.
Course Description:
Computer vision is a discipline that attempts to extract information from images and videos. Nearly every smart device on the planet has a camera, and people are increasingly interested in how to develop apps that use computer vision to perform an ever expanding list of things including: 3D mapping, photo/image search, people/object tracking, augmented reality etc. This course is intended for students who are not familiar with computer vision, but want to come up to speed rapidly with the latest in environments, software tools and best practices for developing computer vision apps. No prior knowledge of computer vision or machine learning is required although a strong programming background is a must (at a minimum good knowledge of C/C++). Topics will include using conventional computer vision software tools (OpenCV, MATLAB toolboxes, VLFeat, CAFFE), and development on iOS devices using mobile vision libraries such as GPUImage and fast math libraries like Armadillo and Eigen. For consistency, all app development will be in iOS and it is expected that all students participating in the class have access to an Intel-based MAC running OS X Mavericks or later. Although the coursework will be focussed on a single operating system, the knowledge gained from this class is intended to generalize to other mobile platforms such as Android etc.
Computer vision is a discipline that attempts to extract information from images and videos. Nearly every smart device on the planet has a camera, and people are increasingly interested in how to develop apps that use computer vision to perform an ever expanding list of things including: 3D mapping, photo/image search, people/object tracking, augmented reality etc. This course is intended for students who are not familiar with computer vision, but want to come up to speed rapidly with the latest in environments, software tools and best practices for developing computer vision apps. No prior knowledge of computer vision or machine learning is required although a strong programming background is a must (at a minimum good knowledge of C/C++). Topics will include using conventional computer vision software tools (OpenCV, MATLAB toolboxes, VLFeat, CAFFE), and development on iOS devices using mobile vision libraries such as GPUImage and fast math libraries like Armadillo and Eigen. For consistency, all app development will be in iOS and it is expected that all students participating in the class have access to an Intel-based MAC running OS X Mavericks or later. Although the coursework will be focussed on a single operating system, the knowledge gained from this class is intended to generalize to other mobile platforms such as Android etc.
Course Description:
Systems engineering examines methods of specifying, designing, analyzing, and testing complex systems. In this course, principles and processes of systems engineering are introduced and applied to the development of robotic devices. The focus is on robotic system engineered to perform complex behavior. Such systems embed computing elements, integrate sensors and actuators, operate in a reliable and robust fashion, and demand rigorous engineering from conception through production. The course is organized as a progression through the systems engineering process of conceptualization, specification, design, and prototyping with consideration of verification and validation. Students completing this course will engineer a robotic system through its complete design and initial prototype. The project concept and teams can continue into the following semester (16-474 Robotics Capstone) for system refinement, testing and demonstration.
Systems engineering examines methods of specifying, designing, analyzing, and testing complex systems. In this course, principles and processes of systems engineering are introduced and applied to the development of robotic devices. The focus is on robotic system engineered to perform complex behavior. Such systems embed computing elements, integrate sensors and actuators, operate in a reliable and robust fashion, and demand rigorous engineering from conception through production. The course is organized as a progression through the systems engineering process of conceptualization, specification, design, and prototyping with consideration of verification and validation. Students completing this course will engineer a robotic system through its complete design and initial prototype. The project concept and teams can continue into the following semester (16-474 Robotics Capstone) for system refinement, testing and demonstration.
Course Description:
[IDeATe course] Human dexterous skill embodies a wealth of physical understanding which complements computer-based design and machine fabrication. This project-oriented course explores the duality between hand and machine through the practical development of innovative design and fabrication systems. These systems fluidly combine the expressivity and intuition of physical tools with the scalability and precision of the digital realm. Students will develop novel hybrid design and production workflows combining analog and digital processes to support the design and fabrication of their chosen projects. Specific skills covered include 3D scanning, 3D modeling (CAD), 3D printing (additive manufacturing), computer based sensing, and human-robot interaction design. Areas of interest include architecture, art, and product design. CROSS-LISTED COURSE: 48530
[IDeATe course] Human dexterous skill embodies a wealth of physical understanding which complements computer-based design and machine fabrication. This project-oriented course explores the duality between hand and machine through the practical development of innovative design and fabrication systems. These systems fluidly combine the expressivity and intuition of physical tools with the scalability and precision of the digital realm. Students will develop novel hybrid design and production workflows combining analog and digital processes to support the design and fabrication of their chosen projects. Specific skills covered include 3D scanning, 3D modeling (CAD), 3D printing (additive manufacturing), computer based sensing, and human-robot interaction design. Areas of interest include architecture, art, and product design. CROSS-LISTED COURSE: 48530
Prerequisites:
- 60223 or 16223
Course Description:
The field of human-robot interaction (HRI) is fast becoming a significant area of research in robotics. The basic objective is to create natural and effective interactions between people and robots. HRI is highly interdisciplinary, bringing together methodologies and techniques from robotics, artificial intelligence, human-computer interaction, psychology, education, and other fields. This course is primarily lecture-based, with in-class participatory mini-projects, homework assignments, a group term project that will enable students to put theory to practice, and a final. The topics covered will include technologies that enable human-robot interactions, the psychology of interaction between people and robots, how to design and conduct HRI studies, and real-world applications such as assistive robots. This course has no prerequisites, but some basic familiarity with robots is recommended (programming knowledge is not necessary, but is useful for the term project).
The field of human-robot interaction (HRI) is fast becoming a significant area of research in robotics. The basic objective is to create natural and effective interactions between people and robots. HRI is highly interdisciplinary, bringing together methodologies and techniques from robotics, artificial intelligence, human-computer interaction, psychology, education, and other fields. This course is primarily lecture-based, with in-class participatory mini-projects, homework assignments, a group term project that will enable students to put theory to practice, and a final. The topics covered will include technologies that enable human-robot interactions, the psychology of interaction between people and robots, how to design and conduct HRI studies, and real-world applications such as assistive robots. This course has no prerequisites, but some basic familiarity with robots is recommended (programming knowledge is not necessary, but is useful for the term project).
Course Description:
In this course students refine the design, build, integrate, test, and demonstrate the performance of the robot they designed in the pre-requisite Systems Engineering Course (16-450). The students are expected to continue to apply the process and methods of Systems Engineering to track requirements, evaluate alternatives, refine the cyberphysical architectures, plan and devise tests, verify the design, and validate system performance. In addition, the students learn and apply Project Management techniques to manage the technical scope, schedule, budget, and risks of their project. The course consists of lectures, class meetings, reviews, and a final demonstration. Lectures cover core topics in Project Management and special topics in Systems Engineering. During class meetings the students and instructor review progress on the project and discuss technical and project-execution challenges. There are three major reviews approximately at the end of each of the first three months of the semester. For each review, the students give a presentation and submit an updated version of the System Design and Development Document. The course culminates in a System Performance Validation Demonstration at the end of the semester. In addition to that the students hold a special demonstration of their robotic system for the broader Robotics community.
In this course students refine the design, build, integrate, test, and demonstrate the performance of the robot they designed in the pre-requisite Systems Engineering Course (16-450). The students are expected to continue to apply the process and methods of Systems Engineering to track requirements, evaluate alternatives, refine the cyberphysical architectures, plan and devise tests, verify the design, and validate system performance. In addition, the students learn and apply Project Management techniques to manage the technical scope, schedule, budget, and risks of their project. The course consists of lectures, class meetings, reviews, and a final demonstration. Lectures cover core topics in Project Management and special topics in Systems Engineering. During class meetings the students and instructor review progress on the project and discuss technical and project-execution challenges. There are three major reviews approximately at the end of each of the first three months of the semester. For each review, the students give a presentation and submit an updated version of the System Design and Development Document. The course culminates in a System Performance Validation Demonstration at the end of the semester. In addition to that the students hold a special demonstration of their robotic system for the broader Robotics community.