Integrated MEMS Inertial Measurement Unit
This Project is no longer active.
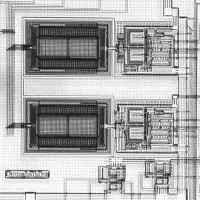
Our goal is to develop an Integrated MEMS Inertial Measurement Unit (IMIMU) as a monolithically integrated microsystem, taking advantage of developing capabilities for the design and implementation of application-specific single-chip MEMS.
The IMIMU will integrate arrays of accelerometers and gyroscopes with analog signal conditioning circuitry and digital signal processing (DSP). The individual inertial sensors provide raw data with imperfections such as finite offsets, finite cross-axis sensitivities, and limited range. Data from an array can be combined to compensate for these imperfections. Ultimately, on-chip fusion of the sensor signals is to be accomplished by digitizing the signals and using DSP.
Due to the need for integration of microsensors with electronics, the IMU is being implemented in a CMOS-micromachining fabrication process. MEMS devices are made from the interconnect dielectric and metal layers present in conventional CMOS processes. Design complexity is being managed using the top-down design methodology for integrated MEMS design and by the back-end methodologies being developed within this project for feature recognition for extraction and MEMS testing.
current head

current staff

current contact
past staff
- Bikram Baidya
- Shawn Blanton
- Richard Carley
- Nilmoni Deb
- Lars Erdmann
- Satyandra Gupta
- Kai He
- Sitaraman Iyer
- Qi Jing
- Hasnain Lakdawala
- Tamal Mukherjee
- Jiangfeng Wu
- Huikai Xie
- Xu Zhu