Autonomous Vehicle Health Monitoring

This Project is no longer active.
Research Question
How to meet the self-health monitoring needs of the emerging generation of complex-mission, long-duration autonomous vehicles?
Motivation
As DoD autonomous vehicles begin to take on more-complex and longer-duration missions they will need to incorporate knowledge about the current state of their sensing, actuation, and computing capabilities into their mission and task planning.
Solution
Use automatic data mining techniques to identify anomalous readings across a large number of sensor inputs and use these detections to diagnose current failures and predict future failures.
Create a prototype diagnostic and prognostic capability for maritime autonomous vehicles based on the core algorithms and data structures used successfully in an existing aircraft maintenance system.
Impact
Health monitoring is a key enabler for the complex autonomous vehicles currently under development and will greatly improve the probability of mission success for these vehicles.
Approach
- Create a prototype diagnostic and prognostic capability for maritime autonomous vehicles based on the core algorithms and data structures used successfully in an existing aircraft maintenance system.
- Evaluate the performance of this system operating on real-world maritime autonomous vehicle data.
- Near-real-time execution using replay of archived data.Evaluate by comparison against known failures recorded in operating / maintenance logs.
Test Platforms / Data Source
CMU Cooperative Robotic Watercraft project – small low-cost autonomous boats that will be fielded in the Pittsburgh area
Probably the first USVs to be operated on a 24/7 schedule for long periods of time (weeks to months).
Simple boats, but operating schedule provides a strong likelihood of observing multiple failure cases during the course of the project.
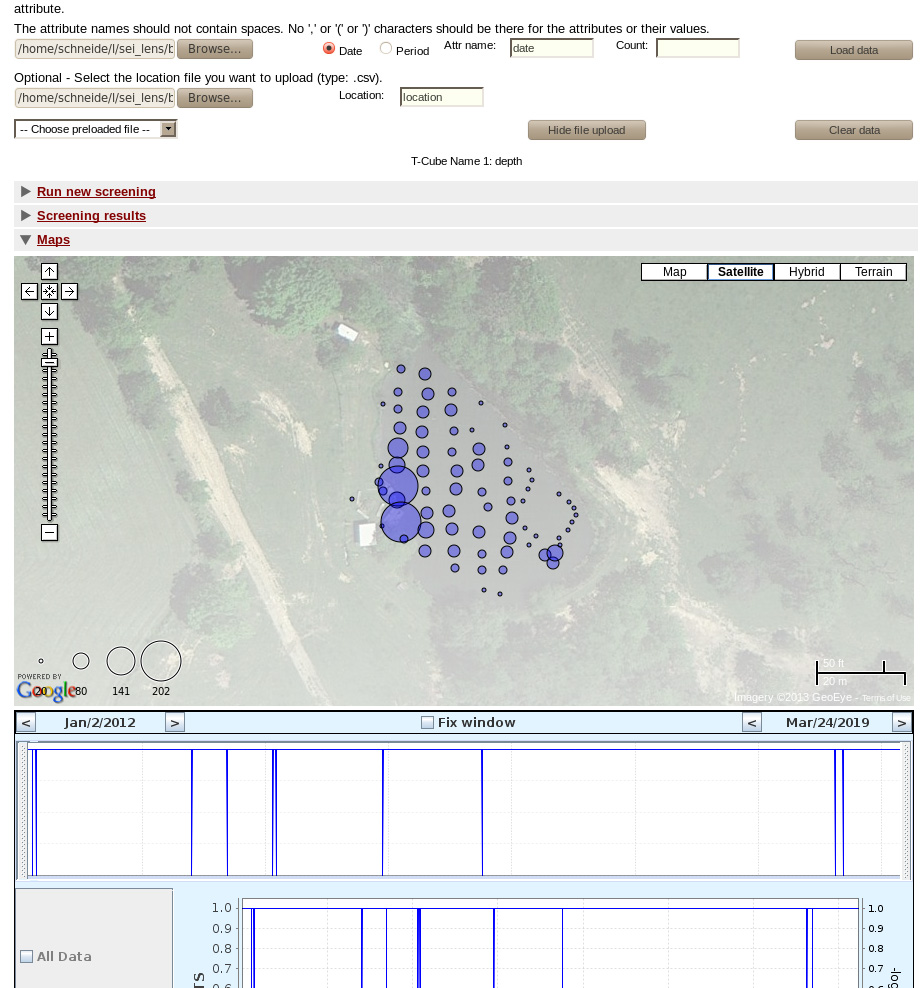
Progress
We have taken the data from a previous deployment of the boats in a pond in West Virginia and loaded it into the TCWI system. We have started by looking at the depth sensor measurements. We ran the anomaly screening algorithm on it and identified instances where the depth readings were different than what was expected given historical readings.
